DROGO דרוגו
- עדי זמוסטיאנו, חופית דיין, אורי הבר, אביעד יערי, אנדרי דורונין, אלון פרגר ומיכל צירולניקוב
- עמי זנגו

מטרת הפרויקט: תכנון, פיתוח וייצור פלטפורמה המורכבת מאלמנטים, בעלת יכולת התפצלות של האלמנטים, והפעלה של האלמנטים באופן עצמאי ובמקביל זה לזה.
דרישות המערכת:
- רחפן בודד (אלמנט) יישא חבילה במשקל עד ובגודל עד
- משקל אלמנט בין
- המראה בתצורת אם מחוברת של מספר אלמנטים מנקודת שילוח קרקעית עד לגובה שיוט
- טיסה אופקית לטווח של עד
- מסירת חבילה ביעד
- טיסה אופקית חזרה לנקודת השילוח
שלב זה של הפרויקט יכלול מעבר ממצב מורכב לפיצול בלבד
צוותי העבודה:
- אווירודינמיקה
- מבנה
- בקרה וסימולציה
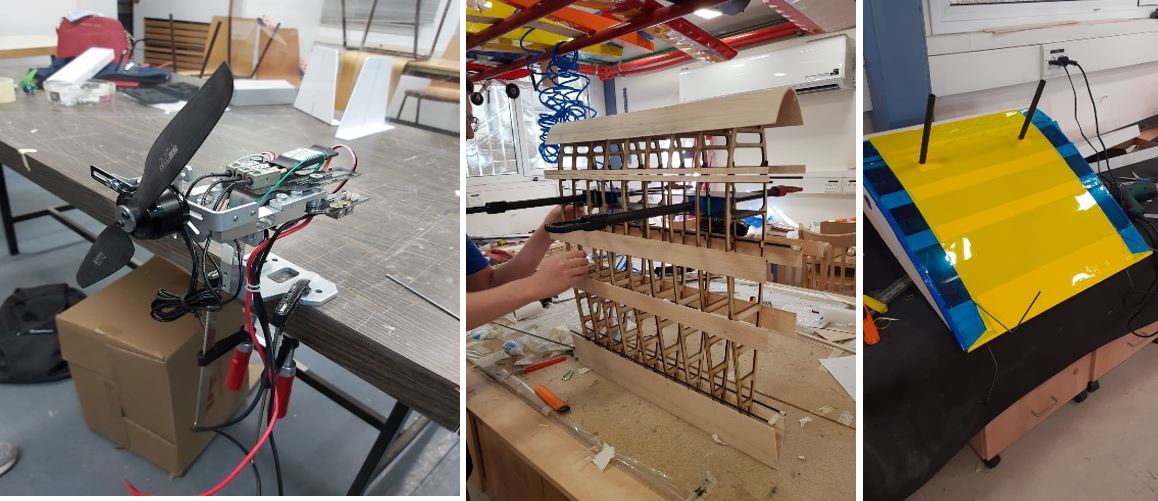
הקבוצה עליה הוטלה המשימה מנתה שבעה סטודנטים ובמסגרת הפרויקט התקיימו פגישות עם מנחה הפרויקט אחת לשבוע, במסגרתן כל צוות הציג את התקדמותו במהלך השבוע ואת יעדיו לשבוע הבא. במהלך השנה התקיים ניסוי הרצת מנוע וייצור אב טיפוס במעבדת כטב"ם
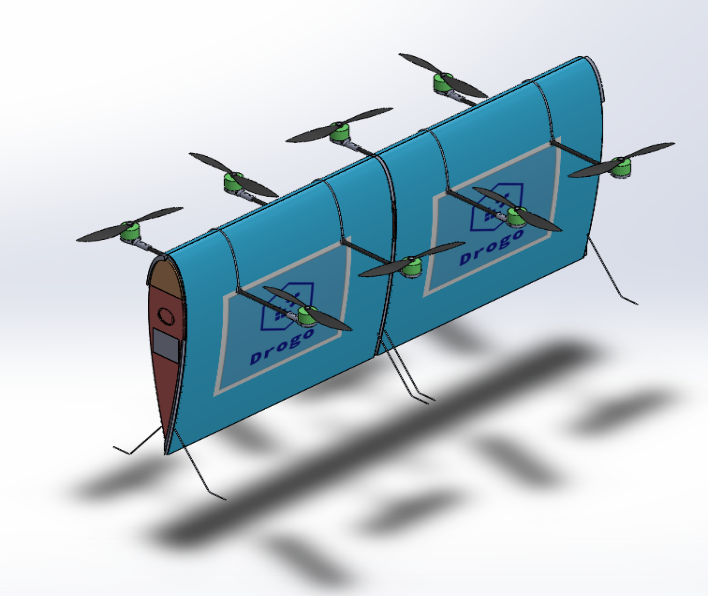
במהלך הסמסטר הראשון בוצע סקר שוק, נעשה ניתוח חלופות והפתרון הנבחר הוא פלטפורמה המורכבת מספר רחפנים מסוג tail-sitter – שילוב של רחפן quadcopter עם כנף – בצורה זו הפלטפורמה מסוגלת להמריא אנכית כרחפן ולאחר תמרון לשייט בתצורת כנף ובהמשך להתפצל חזרה ולבצע משימה.
הפתרון נבחר משיקולים של יצוריות, אווירודינמקה ובקרה.
בוצע תכן ראשוני ומפורט של האלמנט. כולל בחירת רכיבים אלקטרונים, מנועים ופרופלרים מתאימים. תכנון זרועות, במות שירות, וצלעות חיזוק. נתונים מרכזיים: פרופיל כנף NACA0018, אורך מיתר ומוטת כנף 65 ס"מ, קוטר פרופלור -11 אינץ. חומרים: קרבון ועץ צפצפה.
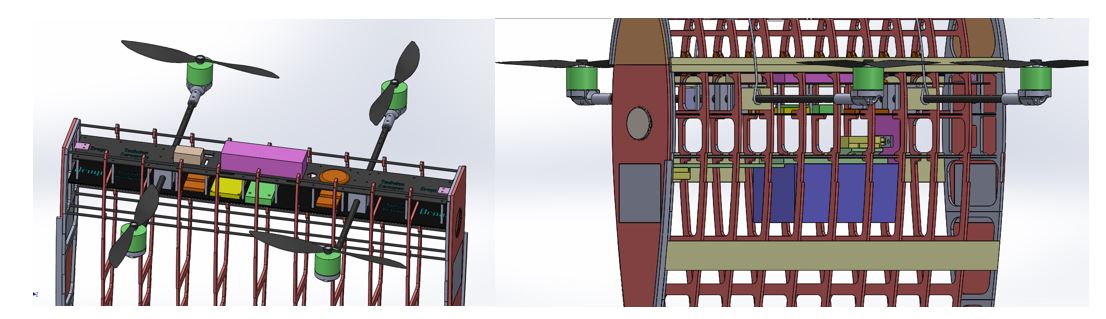
בנוסף פותח מנגנון חיבור/ניתוק ייחודי המאפשר התחברות הרחפנים לתצורת אם המעניקה לפלטפורמה צורת כנף ארוכה בעלת שטח כנף גדול.
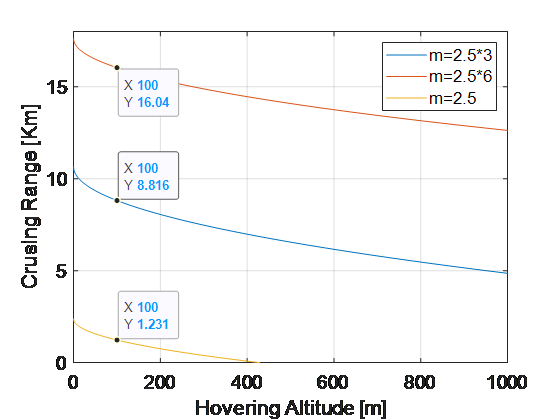
התבצע ניתוח אווירודינאמי שהמעיד על שיפור ביעילות האנרגטית ויכולות אווירודינמיות גבוהות על פני יכולותיו של רחפן בודד ועל ידי כך ניתן להגיע למרחק רב יותר תוך שמירה על חיי הסוללה של הרחפנים.
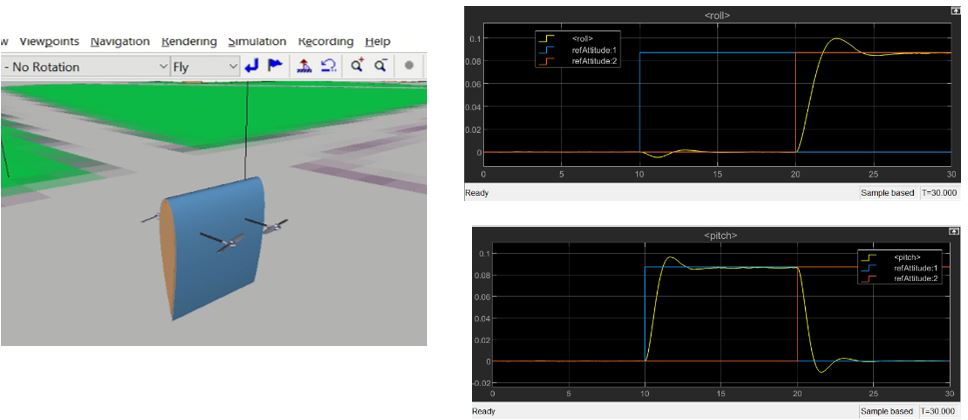
פותחה סימולציית שש דרגות חופש הכוללת ויזואליזציה, פיתוח מודל אווירודינמי של מבנה הרחפן (כולל הכנף והזרועות) מודל מנועים, ופותחו חוגי בקרה (בקר גובה, עלרוד גלגול וסבסוב).
במהלך השנה בוצע ניסוי הרצת מנוע עבור טיוב מודל המנועים בסימולציה, בוצע ייצור והרכבה של אלמנט בודד בסדנא בפקולטה, תוך שימוש בייצור חלקים במדפסת תלת מימד.