



לוויין DriveSAT
- נמרוד זידמן, ניב טפירו, מורדכי פרל, סימונה די פורטו, רועי שילי, עומר שמיר, אייל דווידוב, מתן עבדל
- יעקוב הרשקוביץ
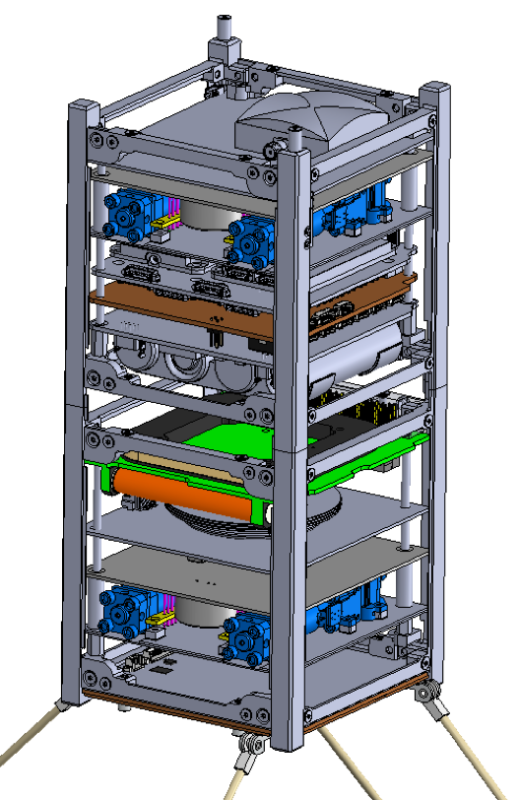
לוויין הדרייבסט הינו פרויקט המפותח על ידי צוות סטודנטים בשנה הרביעית לתואר ראשון מהפקולטה להנדסת אווירונאוטיקה וחלל בטכניון, אשר מונחה על ידי יעקוב הרשקוביץ. התוצר הסופי של הפרויקט יהיה ננו-לוויין ניסיוני מתקן CubeSat 2U המתוכנן להיות מדגים טכנולוגיה עבור מנוע פלסמה חדש וגלגל מומנטום המבוסס על רעיון חדשני, וישלב את יתר המערכות מרכיבי מדף.
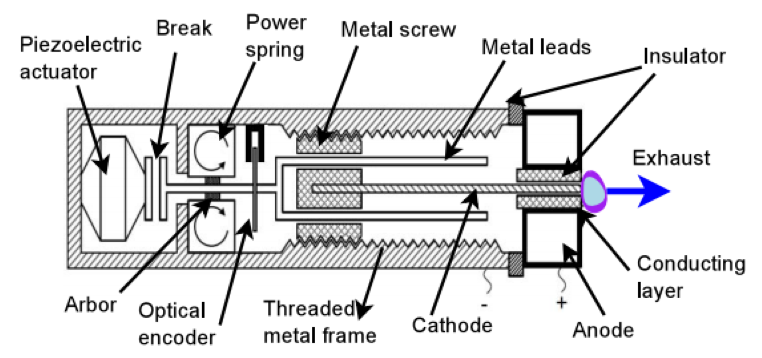
פרויקט הדרייבסט בנוי סביב שתי משימות. המשימה העיקרית מתמקדת במנוע הניסיוני inline-screw-feeding vacuum arc thruster (ISF-VAT, או בקצרה VAT), אשר מפותח על ידי פרופ' חבר יגאל קרונהאוז במעבדת הפלסמה במכון אשר לחקר החלל (ASRI). מנוע הVAT הינו מנוע חשמלי חדשני אשר נועד להקנות יכולות הנעה לננו-לוויינים ולאפשר להם בקרת מסלול.
בשנים האחרונות, השימוש בלוויינים מסטנדרט הCubeSat נמצא בעליה דרמטית, כאשר כמעט 300 שוגרו ב-2017 בלבד. עבור הקטנים שבננו-לוויינים הללו לא קיימות מערכות הנעה עקב מגבלות הגודל והמשקל החמורות. הננו-לוויינים הנ"ל מוגבלים לטיסה פסיבית, בה הם מושפעים מפרטורבציות חיצוניות ודעיכת מסלול טבעית, וללא יכולות לתקן שגיאות בכניסה למסלול.
עקב גדלו ומשקלו הקטנים, מנוע הVAT יכול להוות מקור דחף, כ-, עבור ננו-לוויינים אפילו בגודל 1U. הטכנולוגיה הזו תאפשר שדרוג דרמתי בהיקף המשימות האפשריות והיכולות של ננו-לוויינים. דרייבסט הינו מסטנדרט CubeSat 2U, יכיל 4 מנועי VAT, מורכבים על גבי שתי תת מערכות המכילות שני מנועים, וישתמש בהם להוכיח את יכולות בקרת מסלול.
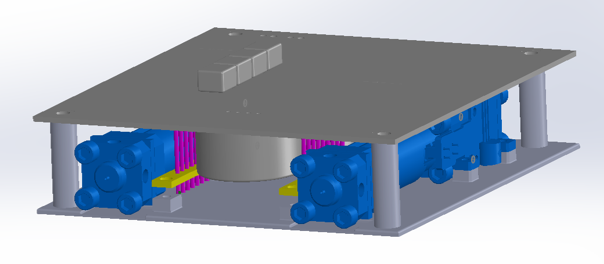
המשימה המשנית עוסקת ביישום גישה חדשה ליצור גלגלי מומנטום ללוויינים. הרעיון, אשר הוצע על ידי מכון ASRI, כרוך בהחלפת רכיבי מדף יעודים המוצעים על ידי חברות רכיבי החלל השונות (בעלות גבוהה מאוד), ברכיב המיוצר על ידי הסבת כונן קשיח לגלגל מומנטום (HDD-MW). הרעיון הזה, לאחר הוכחתו, יאפשר להוריד את עלויות פרויקטי ננו-לוויינים, ובכך להופכם שמישים לקהל רחב יותר.
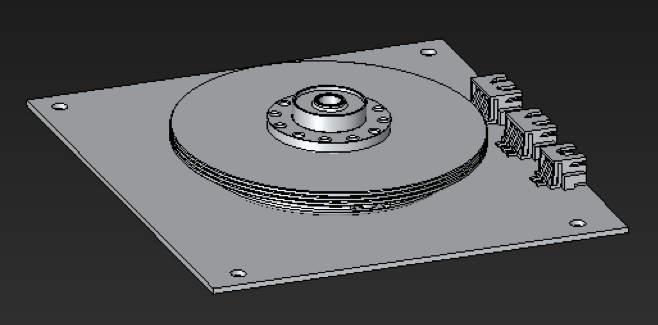
ה- HDD-MWישתמש בדיסק ובמנוע של הכונן הקשיח ולאחר שינוים מינימליים יתפקד בדיוק כמו גלגל מומנטום רגיל כחלק ממערכת בקרת ההכוון של הלוויין (ADCS). לוויין הדרייבסט יכיל HDD-MW אחד על מנת לאפשר בקרה חד צירית, בעוד בקרה תלת צירית נוספת תסופק על ידי מערכת מגנטורקרים/מגנטומטרים.
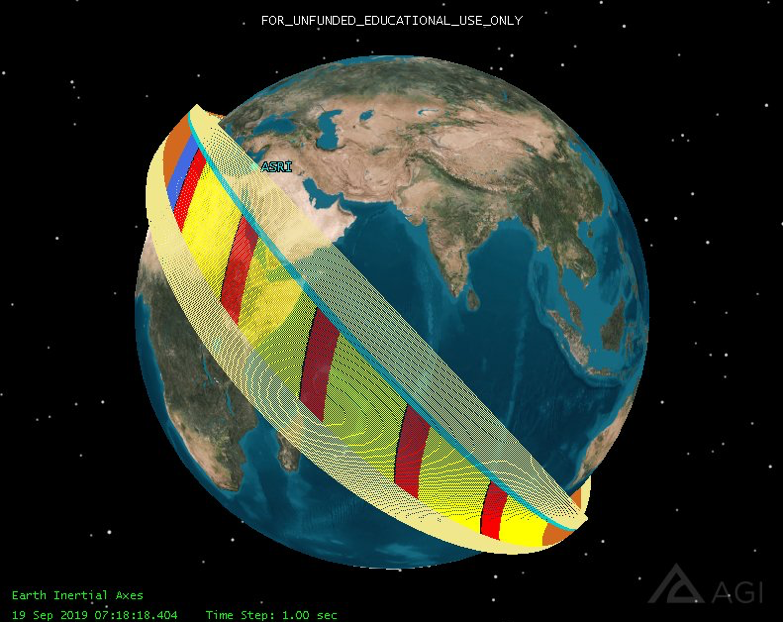
משימת הדרייבסט נועדה לבחון ולהוכיח את היכולות של שתי הטכנולוגיות הנ"ל על ידי שימוש בהן לאורך סדרת ניסוים במשך שנה שלמה במסלול. הלוויין יושם במסלול מעגלי בגובה 620 קילומטר ובזווית נטייה של 47 מעלות. הערכים הללו נבחרו לאחר תהליך לבחינת המסלול האידיאלי עבור תקשורת עם תחנת הקרקע של מכון אשר ויחס דחף/גרר אידיאלי, ללא חריגה מחוקי אורך חיי לוויין בינלאומיים. היות ומציאת ספק שיגור לגובה וזווית ספציפיים יכול להיות בלתי אפשרי או לפחות יקר מאוד, הצוות גם הגדיר מעטפת פעולה בה ניתן לקבל מסלולים לא אופטימליים בביטחון.
תוכננו שני סוגי ניסוים. כלל שלבי המשימה עברו סימולציות בעזרת תוכנת Systems Tool Kit (STK) של AGI.
ניסוי בקרת המסלול נועד להוכיח יכולות בקרת מסלול על ידי ביטול השפעת הגרר האטמוספרי והעלאת חצי הציר הגדול (SMA) של מסלול הלוויין. ההעלה נעשית על ידי ירי חצי רציף של המנועים בכיוון המנוגד לתנועה במשך 50 הקפות רציפות, או בקירוב כ-3 ימים.
משך ההפעלה הארוכה נחוץ משתי סיבות: אחת, הדחף הנמוך אשר מייצרים המנועים, והסיבה השנייה היא הגבלה נדרשת להפעלת המנועים רק בזמנים בהם הלווין חשוף לאור השמש. זאת על מנת להוריד מהעומס על המערכת החשמלית היות והאנרגיה החשמלית נאגרת על ידי פנלים סולריים. במהלך שלושת הימים הנ"ל ה-SMA גדל בכ-300 מטרים.
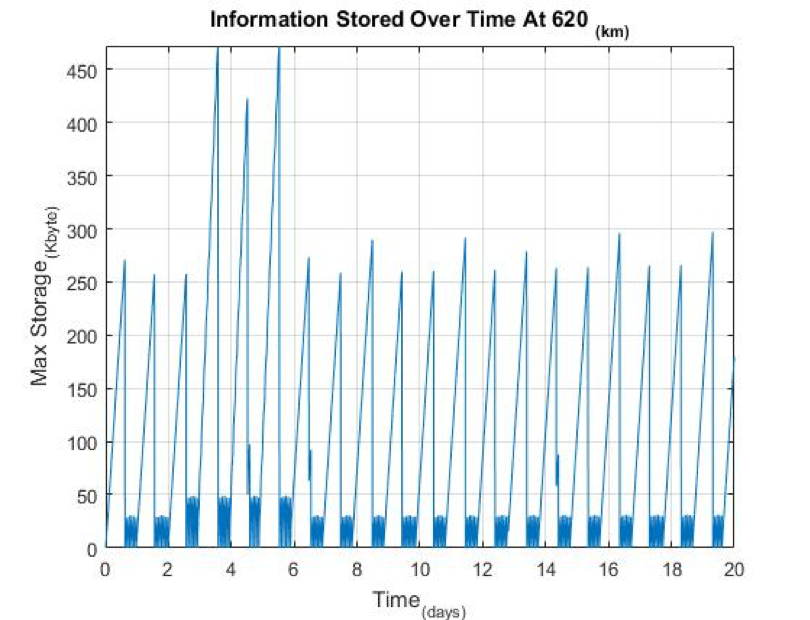
את תוצאות ניסוי זה מחשבים ממדידות מיקום ומהירות המבוצעות על ידי הלוויין במרווחי זמן שווים שמוכתבים על ידי המצב הלוגי הנוכחי של הלוויין כפי שהוגדר באנליזת הזיכרון. אנליזת הזיכרון לוקחת בחשבון את הזיכרון בלוויין ואת קצב העברת המידע לתחנת הקרקע. הנתונים עוברים המרה לנתונים ממוצעים מסוג Brouwer-Lyddane ומתוכם מחשבים את ה- ואת דחף המנועים.
הניסוי השני תוכנן על מנת למדוד בצורה מדויקת את הדחף הנוצר על ידי מנועי ה-VAT בסביבת חלל, ולכמת את השנויים בביצועים לאורך המשימה. הניסוי כולל ירי בו-זמני של שני מנועים לאורך פאה אחת של הלוויין שמפעיל מומנט על גוף הלוויין. מערכת בקרת ההכוון תתנגד למומנט הזה ותשמר הכוון קבוע, ובעזרת מדידות מסוימות יהיה ניתן לחשב את הדחף שמיצרים המנועים עם ייתכנות שגיאה של פחות מאחוז אחד.
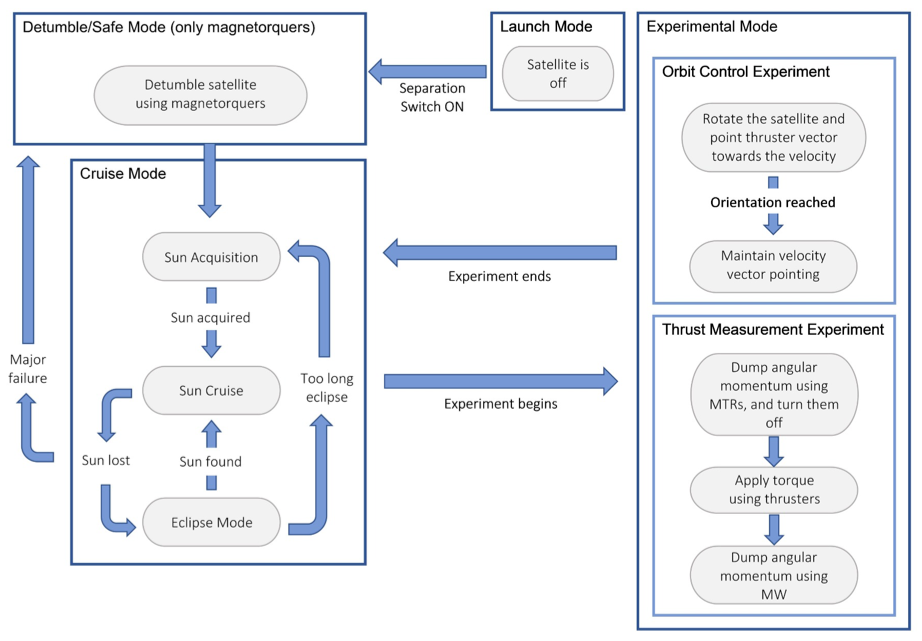
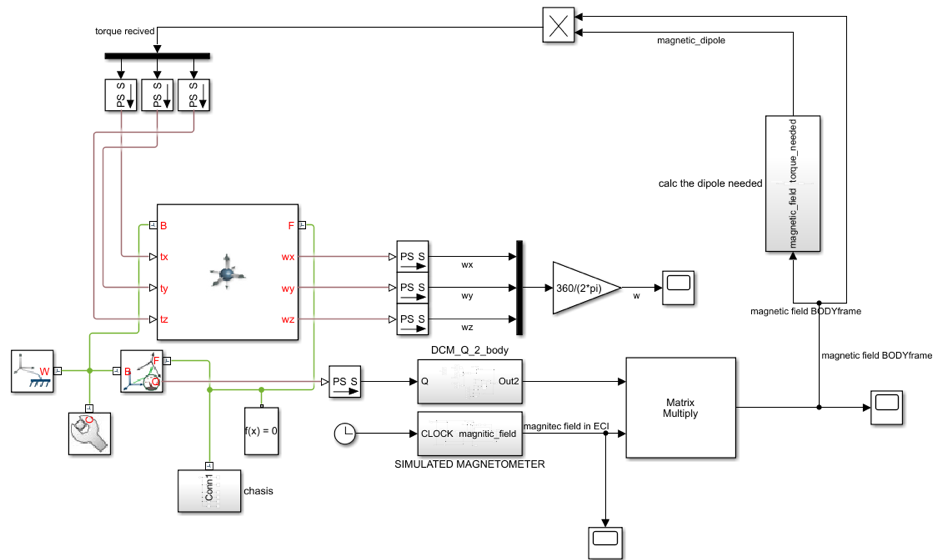
מערכת בקרת ההכוון היא מערכת לא ליניארית מרובת קלטים ופלטים המפותחת על ידי הצוות, ומבוססת על שיטת ה-Bdot אשר מודדת ומשתמשת בשדה המגנטי של כדור הארץ. המערכת כוללת מספר מצבי פעולה שונים עבור שלבים שונים במשימת הלוויין. המערכת עברה מספר סימולציות מקיפות בתוכנות SimuLink ו-SimScape.
כפי שהוזכר בפתיח, אחת מדרישות הפרויקט היתה להשתמש ברכיבי מדף, למעט מערכות ה-VAT וה-HDD-MW. רכיבי הלוויין נבחרו בתהליך AHP בכדי לוודא תאימות בין כל התת-מערכות תוך כדי עמידה בדרישות במחיר מינימלי. התצורה הסופית נבדקה בסימולציות שונות על מנת לוודא שהמערכת החשמלית תוכל לעמוד בעומס.
תחילה בוצעה סימולציית STK אשר סיפקה את מיקום הלוויין ביחס לכדור הארץ ולשמש בנוסף לזמני הפעלת המנועים ופרמטרים אחרים לאורך המשימה. מידע זה הועבר למחלקת בקרת ההכוון ועובד על ידה בסימולציות נפרדות. הנתונים שהגישה קבעו אילו מהמפעילים פועלים וכמה הספק נדרש עבורם בכל עת, וסיפקה מידע יחד על הכוון הלוויין הרגעי ביחס לשמש.
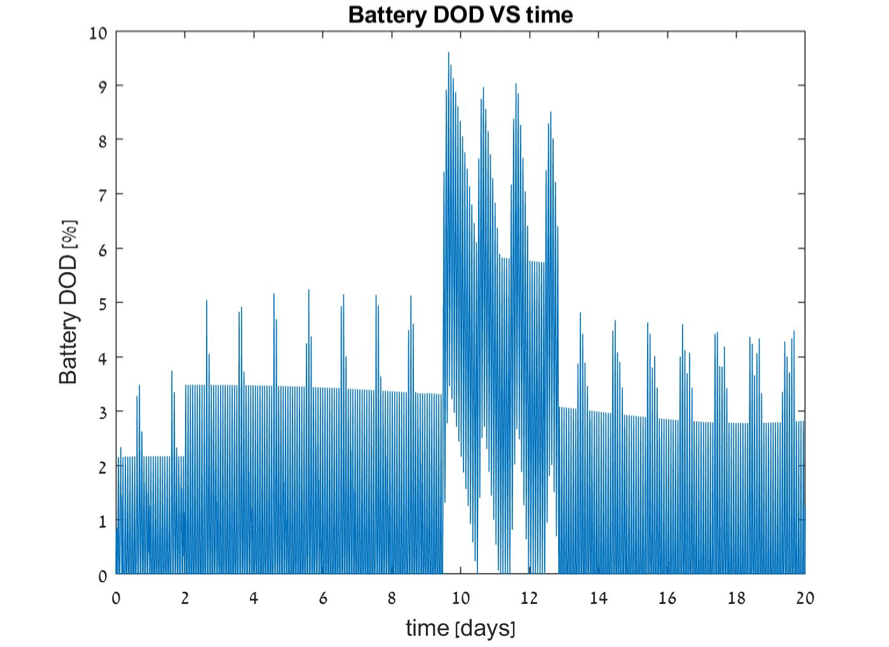
בשלב הבא הנתונים הללו הועברו לסימולציית חשמל בה נלקחו בחשבון כל המערכות, תת-המערכות והחיבורים בין הרכיבים, על מנת לתת תמונת מצב על פיזור הספק החשמל ומאזן האנרגיה בכל רגע נתון. הסימולציות הללו נועדו על מנת להוכיח כי התפקוד של מערכות הלוויין הינו אפשרי ובטוח לכל אורך המשימה.
הצוות פתח בשיח פורה עם ספקי שיגור על מנת להתחיל את תהליך מציאת חלון שיגור אשר מתאים לצרכיו. בנוסף הצוות יצר מסמכי רכש והרכבה ולוחות זמנים מפורטים אשר מתעדים את כל שנותר לעשות על מנת להשלים את הפרויקט.

