פרויקט דרייבסאט – DriveSat
- מיכל פושקוב, תום נזר, ליזה ברנשטיין, אלינור בורנשטיין, אופל חכמון, איה רודק
- יעקב הרשקוביץ
מבוא
ה-DriveSat הוא לוויין מסוג CubeSatבגודל2U שפותח על ידי סטודנטים בשנה ד' ומובל על ידי מכון אשר לחקר החלל בטכניון.
הלווין יבצע את המשימות הבאות:
❑ בדיקת טכנולוגיית הנעה חשמלית של מכון אשר שפותחה לאחרונה, מערכת ההנעה היא מסוג ISF-VAT. את המערכת נבחן בסביבת חלל תוך הערכת ביצועי המערכת בחלל.
❑ הדגמת מעבר בין מסלולים באמצעות מערכת ההנעה החשמלית.
❑ הדגמת שימוש בכונן קשיח רגיל של מחשב בתור גלגל ריאקציה, בסביבת החלל.
ניסויים
כדי להשיג את מטרות המשימה, ייערכו שני סוגי ניסויים בחלל:
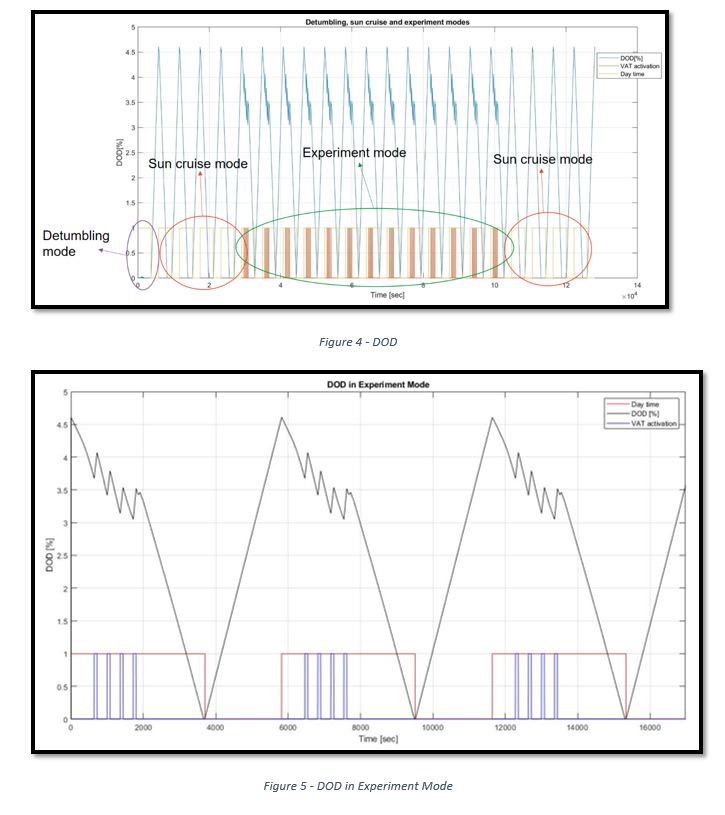
- בקרת מסלול-שינוי מסלול הלוויין על ידי הפעלת מערכת ההנעה, התמרון הטיפוסי יכלול 4 פלוסים לכל הקפה במשך 13 הקפות, הפעלות המנוע יבוצעו באור יום.
- מדידת דחף באמצעות גלגל הריאקציה- הפעלת שני מנועים בלבד שיובילו לסבסוב הלוויין והתנגדות הגלגל להפעלה זאת.
הפרמטרים הנמדדים (פרמטרי המסלול שנמדדים בעזרת GPS ומומנט גלגל הריאקציה) ישלחו לתחנת הקרקע לצורך פענוח וניתוח ביצועי הניסויים.
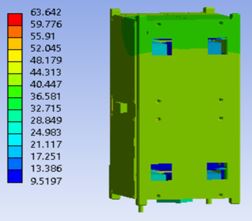
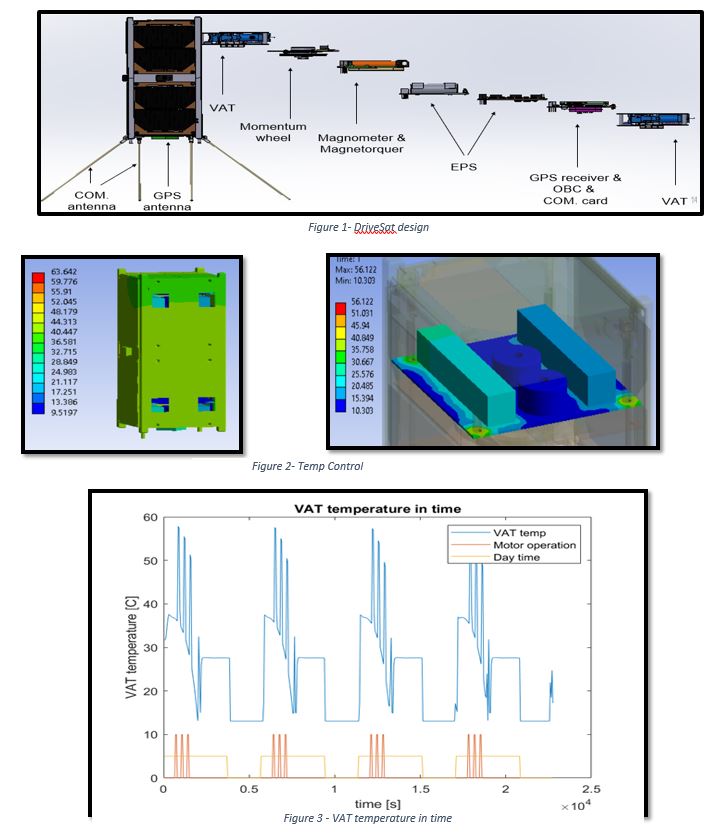
מבנאות ותרמיקה
מטרת צוות מבנאות ותרמיקה היא לתכן את הלווין ולאחר מכן לאשר שתכן הלווין אכן עומד בכל הדרישות. השנה בחרנו PPOD בו נמצא הלווין בשיגור מכדור הארץ ולאחר מכן משתחרר בהגעה למסלול, כתבנו מסמך אינטגרציה המפרט את שלבי ההרכבה של הלווין והגדרנו מפרט מסה. בוצעו אנליזות כח בשיגור בהן בדקנו האם הלווין יכול לעמוד בעומסים אשר נחווים בשיגור ובפרט בעומס המקסימלי אשר נחווה במשגר של VEGA- עומס של 7g. נמצא שהתכן מתאים והלווין עומד בעומסים. בוצעו אנליזות תרמיות בהן נבדקו מקרי הקיצון בהם הלווין יתקל וכן נבדקו מספר מסלולי הקפה. כמו שחשבנו, נמצא שלא ניתן להפעיל את המנועים בזמן שקיים שטף סולרי ישיר עליהם (שמש ישירה), עבור שאר המקרים נמצא שתכן הלווין מתאים ועומד בדרישות.
סימולציית הספק
מטרתה העיקרית של הסימולציה הייתה לאמת את תכן הלוויין ואת ביצועי המשימה, על ידי בדיקת יכולתה של המערכת החשמלית לספק חשמל לכל רכיבי הלוויין במהלך מצבים שונים תוך שמירה על טווח בטחון. הקריטריונים העיקריים היו להבטיח שחיי הסוללה לא יקוצרו באופן דרסטי במהלך המשימה. הדרישה העיקרית הייתה שפריקת הסוללה לא תעלה מעבר ל -15%.
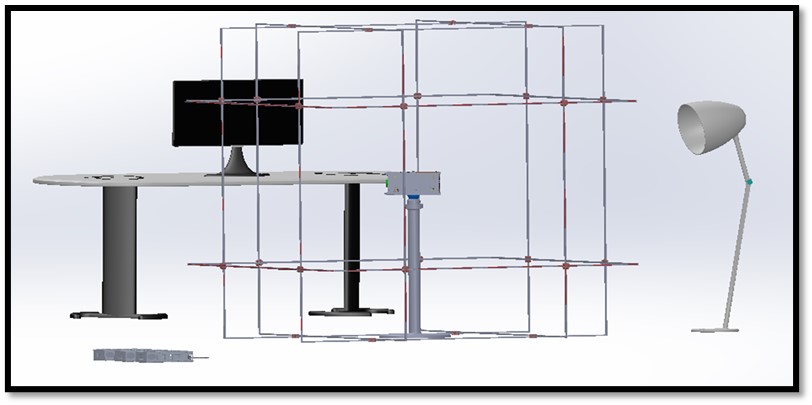
מעבדת בדיקות
התבצע תהליך של הגדרה ותכן ראשוני של מעבדת בדיקות, המורכבת משלוש מערכות. סימולטור מגנטי וסימולטור שמש אשר תפקידם לדמות את השדה המגנטי וקרינת השמש במהלך מסלול הלווין בחלל. בנוסף תוכנן מיסב אוויר שיאפשר ל- DriveSat תנועה חופשית (כמעט) ללא חיכוך בשלוש דרגות חופש. שלושת המערכות יחד יתנו לנו את היכולת ליצור את תנאי המסלול שבהם הלווין צריך לעמוד, ובכך נוכל לבדוק ולאשר את האלגוריתמים שנכתבו עבור בקרת ההכון, וכן גם את מערכות המשנה של החיישנים והמפעילים.
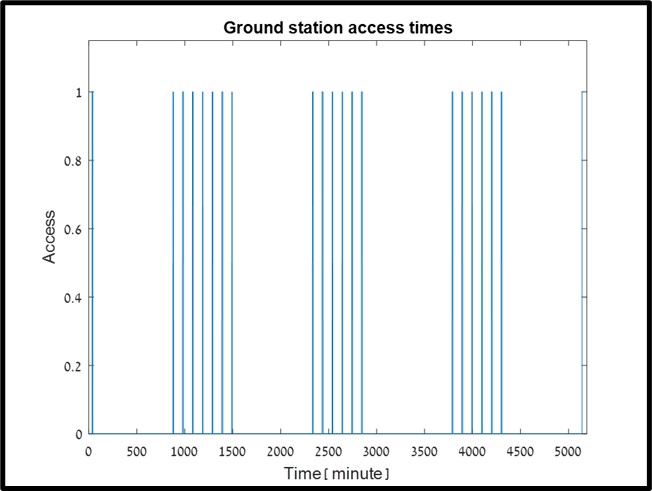
תחנת קרקע
על מנת לאבחן את מצב הלוויין ואת מצב הניסוי כאשר הוא נמצא בחלל, יש צורך להוריד טלמטריה לתחנת הקרקע בכל פעם שמתאפשרת גישה לתחנת הקרקע. העבודה כללה בחירה של הטלמטריה הנדרשת, קביעת קצב הדגימה הנדרש מהחיישנים והמפעילים. קצב זה נבחר עבור כל מוד בנפרד באמצעות מאזן בין כמה מידע אנחנו רוצים לאסוף לבין כמה מידע אנחנו יכולים להוריד לתחנת הקרקע. נמצא כי לאחר חמש גישות רצופות לתחנת הקרקע, יש עיכוב ארוך אחד לגישה הבאה. סוגיה זו טופלה והיא מתופעלת על ידי פונקציות תקשורת.
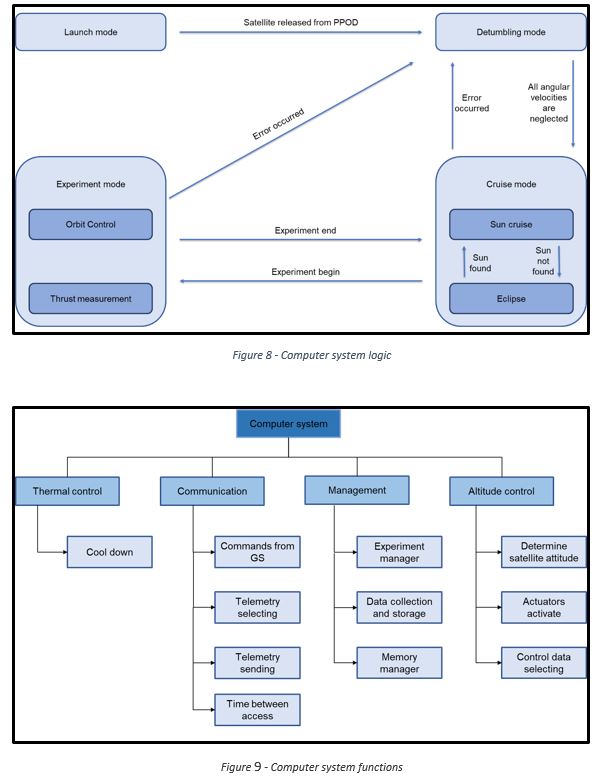
מערכת מחשב
כל הפעילויות שהלוויין יבצע בזמן שהוא במסלול שלו מנוהלות על ידי תוכנת מחשב. הלוויין עובר בין מצבים שונים (שיוט שמש, ליקוי חמה, דטמבלינג, ניסוי) בהתאם לדיאגרמת מצבי הלוויין שהוגדרה. בנוסף הוגדר הבסיס לכתיבת הפונקציות עבור התוכנה, פונקציות בקרה תרמית, פונקציות תקשורת, פונקציות ניהול ופונקציות בקרת הכוון.
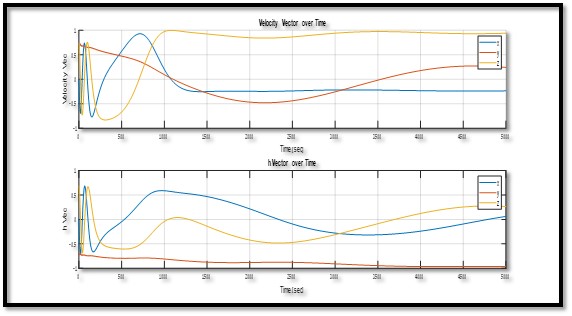
סימולציית בקרה
מערכת הבקרה של DriveSat בנויה לפעול בשלושה מצבים: ניתוק (ייצוב הלוויין לאחר השיגור), סאן קרוז (הפניית הלוויין בגישה האופטימלית לאנרגיית השמש המרבית) ומצב ניסוי (הצבעה ושמירה על DriveSat בכיוון הדרוש לירי הדחפים בכל ניסוי).
דיטמבליג – במצב זה אנו מייצבים את הלוויין לאחר השיגור. זה נעשה עם חוק הבקרה B-Dot המשתמש במומנט MT.
שיוט השמש – בשלב הראשון נייצב את הלוויין ותהיה לנו מומנטום גדול בציר y. זה נעשה על ידי החלת מומנט חיצוני על הגוף בציר y והחלת מומנט פנימי בציר ה- Y עם ה- RW. בשלב השני נסובב את הלוויין כלפי השמש על ידי חישוב הזווית בין הלוויין לשמש באמצעות חיישן השמש. לאחר השגת הכיוון הרצוי, מערכת הבקרה תשמור אותה עד לפקודה לניסוי.
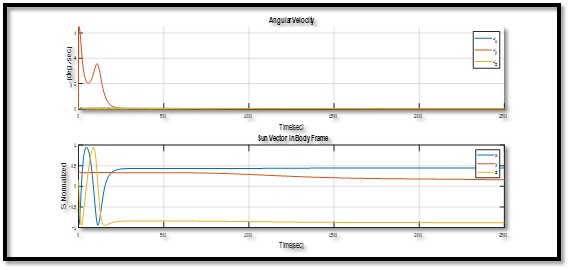
ניסוי – מצב הניסוי מצביע על הדחף בכיוון של וקטור המהירות. כדי להגדיל את זמן הניסוי הפוטנציאלי, לאחר השגת הכיוון הרצוי מערכת הבקרה תשמור אותו עד סוף הניסוי.