



פרויקט Cornetto – Missile Testbed, שנה II
- אפי קלמר, ליאור איסקוב, ליאור יוספוב, דן היינריך, בועז גבריאל, תמיר אלבז, דורון פוטסמן, אור פייביש, אמן דאהר
- שלמה שפונד.

מטרות הפרויקט: תכן מפורט וייצור של טיל לימודי בעל יכולת הנצלה לשימוש רב פעמי, למטרות מחקר, בדיקה והדגמה של טכנולוגיות בתחום הטילאות.
הפרויקט מתבצע בשיתוף פעולה יחד עם קבוצה מ-TUM (Technical University of Munich), במימון רפאל ומפא"ת.
דרישות המערכת:
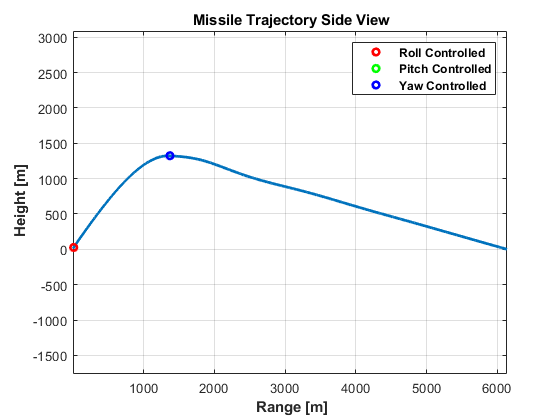
- הגעה לגובה מרבי של 1,500 [m] במסלול בליסטי (הכולל בקרה בגלגול).
- גלישה לטווח מרבי*.
- עמידה בעומסים הצפויים לאורך כלל הטיסה.
- תצורה יציבה אווירודינמית.
- אורך הטיל הכולל 110 [cm], קוטר גוף הטיל 9 [cm].
- תאימות לתכן המשגר של הקבוצה מ-TUM.
- בקדמת הטיל ימוקם מטען ייעודי (כגון ראש ביות).
- יכולת הנצלה לשם שימוש רב-פעמי בטיל.
*גלישה לטווח מרבי אינה מותנית בהגעה לגובה של 1,500 [m].
צוותי העבודה:
- אווירודינמיקה
- בקרה והנחייה
- הנעה
- מבנה
- הנדסת מערכת
במסגרת הפרויקט נערכו פגישות שבועיות של הסטודנטים עם המנחה, במסגרתן נערך דיון הנוגע להתקדמות הפרויקט בכל אחד מהתחומים שצוינו מעלה.
תחילת העבודה התמקדה בהעברת הידע הקיים מהשנה הראשונה של הפרויקט, ותכנון המשך הפעילות מהנקודה בה הפרויקט נעצר בשנה הראשונה. הנושאים שנדונו בשלב זה היו מציאת פתרונות להגדלת טווח הגלישה של הטיל עם סיום הבעירה, תכן מפורט של המנוע הרקטי, תכן בקרי הטיסה ותיקון הסימולציה לצרכי בדיקת הבקרה, ההנחיה וחקר הביצועים. בהמשך, עם קביעת התכן האווירודינמי, יבוצע תכן מפורט למבנה הטיל.
במהלך הפרויקט נעשה שימוש בתוכנות המחשב הבאות:
- Matlab ו-Simulink– לצורך בניית הסימולציה, הערכת המקדמים האווירודינמיים ובקרת הטיל.
- SolidWorks– לצורך תכן מפורט של המנוע הרקטי, מודל המנהרה ומבנה הטיל.
- Missile Datcom– לצורך השוואת המקדמים האווירודינמיים שהתקבלו מהחקר שהתבצעה בעזרת
- Matlab.


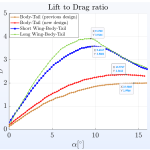
התצורה האווירודינמית היא תצורת כנף-גוף-זנב, כאשר הוספת הכנפיים באה להגדיל את טווח הגלישה, ביחס לתצורה מהשנה הראשונה לפרויקט (תצורת גוף-זנב). כפי שתוכנן בשנה הראשונה לפרויקט, חרטום הטיל נבחר להיות כדורי (במטרה לאחסן בו ראש ביות אופטי בעל מידות ידועות מראש), ההיגוי נבחר להיות היגוי אחורי (הגאים בצורת טרפז) וקוטר הגוף אינו משתנה לאורך הטיל (מלבד בחרטום). הוספת הכנפיים נבדקה כדרך להגדלת הטווח, שכן טווח הגלישה גדל פי 2 (עבור תצורת הכנפיים המוצלחת ביותר שנבדקה) מהתצורה בשנה הראשונה (תוצאה שאומתה בניסויי מנהרה). נבחנו מספר סוגים של כנפיים במספר מיקומים אורכיים לאורך גוף הטיל, במטרה ללמוד את השפעתן על התכונות האווירודינמיות (כאשר העיקריות שבהן הן יחס הגלישה, מקדם הגרר והיציבות).
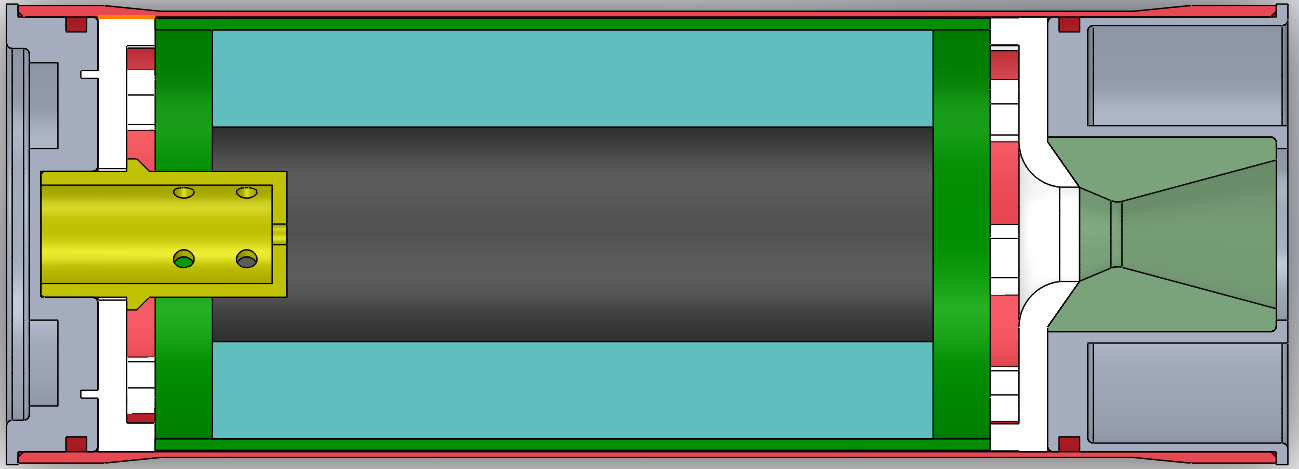
לטיל מנוע רקטי (בעל הודף מוצק) אשר תוכנן באופן מפורט במהלך השנה השנייה, כאשר ההודף נקבע מראש ומסופק על-ידי רפאל. ההודף בוער הן בעירה פנימית והן בעירת קצה. המנוע צפוי לפעול במשך 2 [s] ולשמש כמנוע מאיץ בלבד, כאשר הוא מספק דחף צפוי של 700 [N]. המנוע מתוכנן כך שלאחר בעירת ההודף ניתן לערוך בו שימוש חוזר.
הטיל מבוקר במהלך השיגור בגלגול, ומאוחר יותר בשלב הגלישה גם בעלרוד ובסבסוב. הטיל מנוהג על-ידי 4 משטחי ניהוג אחוריים הנשלטים באופן בלתי תלוי אחד בשני (לכל משטח היגוי יש מנוע סרוו משלו), כאשר במהלך הגלישה יימצאו בתצורת X (במטרה לשפר את האפקטיביות שלהם). לטיל תהיה מערכת הנחיה שתתן את פקודות התאוצה הדרושות למערכת הבקרה.
הטיל מנווט לפי מידע שמתקבל ממחשב הטיסה (מסוג Pixhawk) ומערכת GPS אשר מספקת מידע אודות מיקום ומהירות הטיל.

הטיל מונצל בעזרת פרישה של מצנח ונאסף מהשטח לצורך ניתוח נתונים ושימוש חוזר.
לאחר הערכות המקדמים האווירודינמיים בוצעו ניסויי מנהרה בהם אומת התכן האווירודינמי והוערך באופן מדויק יותר הגרר של התצורה. לאחר ניתוח תוצאות הניסוי התברר כי התצורה עומדת ביעדי הגובה המרבי והגדלת טווח הגלישה.
סימולציית 6-DOF שנבנתה מאפשרת אינטגרציה של התכונות האווירודינמיות עם מערכת הבקרה וההנחיה, כך שניתן לחקור את הביצועים של הטיל בכל שלבי הטיסה.
כמו כן, בוצע תכן מפורט למבנה הפנימי של הטיל, המורכב ממקטעים שונים: מקטע ראש הביות, מקטע אוויוניקה, מקטע המצנח, מקטע הכנפיים ומקטע הזנב (הכולל את המנוע ומשטחי ההיגוי).
לסיכום, בשנה השנייה לפרויקט נרשמה התקדמות משמעותית. התכן האווירודינמי הושלם, תכן המנוע הרקטי הושלם, תכן הבקרים הושלם, וכן הסימולציה נבנתה והיא מוכנה לשילוב מערכת ההנחיה.
בהמשך הפרויקט יהיה צורך בהמשך העבודה על מבנה הטיל, ביצוע חקר ביצועים בעזרת הסימולציה, בנייה ושילוב מערכת ההנחיה וייצור המדגים.

