



אתם הולכים ברחוב ואומרים שלום לחבר – ואז מגלים שזה מישהו אחר. מפספסים את המסדרון הנכון באוניברסיטה. לוקחים את התיק של מישהו אחר בסוף האימון. הרגל שלכם נתקלת באבן שלא הייתה שם – אתם בטוחים! – אתמול. וכבר שעה אתם מחפשים את המלון שהזמנתם בעיר הזאת.
נשמע מוכר? בוודאי. עכשיו תחשבו על רובוט שאמור להימנע מכל השגיאות האלה.
תחום הרובוטיקה מתפתח במהירות מרשימה, ורובוטים שבעבר התקיימו רק בְּעולם המדע הבדיוני הולכים ומתגשמים לנגד עינינו בדמותם של רחפנים חכמים, מכוניות אוטונומיות, שואבי אבק המתנהלים לבדם בבית, ועוד.
לצד האתגרים ההנדסיים-מכניים נדרשים מתכנני הרובוטים כיום להתמודד עם סוגיות מורכבות של תפיסה ותיפקוד. לשם כך מפותחים אמצעי חישה חדשים ויעילים המספקים לרובוט "מידע חושי", וכן מערכות המנתחות את המידע הזה לתמונת עולם מהימנה (perception) ומאפשרות לרובוט לקבל החלטות נכונות. עם זאת, בתנאים של אי ודאות, מידע חסר – תנאי העולם האמיתי – כושלים גם רובוטים שהפגינו ביצועים מושלמים בסביבה האידיאלית של המעבדה.
קפיצת מדרגה בתחום זה מתרחשת לאחרונה בפקולטה, שם פותחה פרדיגמה חדשה של תפיסת מרחב וקבלת החלטות המסייעת לרובוטים לתפקד היטב בעולם האמיתי. המאמרים הרלוונטיים התפרסמו בכנסים ובכתבי עת מובילים בקהיליית הרובוטיקה העולמית.
פרופ'-משנה ואדים אינדלמן, ראש המעבדה לניווט אוטונומי וחישת עולם (ANPL) מהפקולטה להנדסת אווירונוטיקה וחלל בטכניון, מסביר כי "הפרדיגמה החדשה שפיתחנו מכניסה מקורות שונים של אי-ודאות לתוך תהליך קבלת ההחלטות של המערכת האוטונומית (הרובוט) תוך כדי הסתמכות על תוצרי תהליך החישה (perception) עד כה. אם גישות קודמות הסתמכו על ההנחה שרובוט שמתפקד בסביבה אידיאלית 'יסתדר איכשהו' בעולם האמיתי, אנחנו מציעים גישה אחרת לחלוטין: אנחנו מכניסים את ה'עירפול' של העולם האמיתי – מידע חלקי, אי ודאות, פעולה בסביבה בלתי מוכרת ודו משמעית – לתוך 'מערכת ההפעלה' של הרובוט.
"במילים אחרות, במקום לסמוך על הרובוט שיסתדר שם בערפל בחוץ אנחנו ממדלים את ה'ערפל' הצפוי תוך כדי ניתוח הקלט הצפוי להתקבל ממדידים הזמינים לרובוט כתוצאה מפעולות אפשריות שונות; כלומר אנחנו מייצרים 'עירפול אקטיבי' כמרכיב מובנה במערכת ע״י מידול מקורות אי הוודאות השונים. היבט חיוני נוסף שאנחנו חוקרים במסגרת זו הינו ההיבט החישובי, על מנת לאפשר פעולה אוטונומית מקוונת ברובוטים בעלי כושר חישוב מוגבל כגון רחפנים".
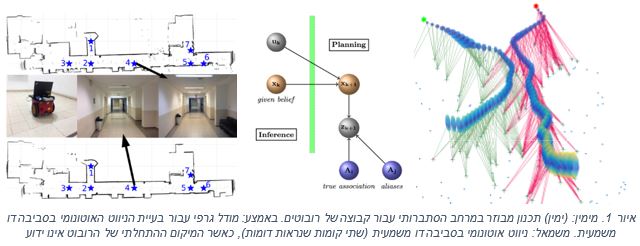
הגישה החדשה (ראו איור 1) מבוססת על תכנון במרחב הסתברותי (belief space planning) – תכנון המבוסס על (1) מידע מוקדם, שהוא תמיד חלקי, (2) הנחות הסתברותיות ו(3) הקלט ה"חושי" שנאסף מחיישנים עד הרגע הנוכחי (למשל, אוסף של תמונות או ענני נקודות תלת ממד).
הצלחתה של גישה זו בניסויי שטח מבשרת התפתחויות עתידיות במגוון תחומים ובהם מיפוי אוטונומי, סיוע באזורי אסון, רכב אוטונומי, ניתוחים רובוטיים, ניווט אווירי מעל ובתוך שטחים עירוניים, כמו גם במערכות רובוטיות ביתיות זולות יחסית המבוססות על מערכות מיחשוב פשוטות.
המעבדה לניווט אוטונומי וחישת עולם ( Autonomous Navigation and Perception Lab – ANPL) בטכניון הוקמה על ידי פרופ'-משנה ואדים אינדלמן בשנת 2015, והיא פועלת בשיתוף הפקולטה להנדסת אווירונוטיקה וחלל והתוכנית הטכניונית למערכות אוטונומיות (TASP). במעבדה נחקרות סוגיות הקשורות לניווט וחישה במערכות רובוטיות אוטונומיות מרובות-סוכנים, תוך התמקדות בביצועים מקוונים מדויקים בסביבה המאופיינת באי ודאות ובדו משמעות. מדובר במחקר בינתחומי המשלב לימודים תיאורטיים, מחקר יישומי ואימותים ניסויים על מערכות רובוטיות מרובות-סוכנים כגון להק-רחפנים. כל רובוט מצויד במגוון מדידים כגון מצלמות רגילות, מצלמות עומק (RGBD), מדי לייזר ומדידי ניווט אינרציאליים (ראו איור 2). קבוצת המחקר במעבדה כוללת אנשי צוות מחקר, סטודנטים לתארים מתקדמים וסטודנטים לתואר ראשון ממגוון פקולטות בטכניון, כולל הנדסת אווירונוטיקה וחלל, מדעי המחשב והנדסת מכונות ומהתכנית הטכניונית למערכות אוטונומיות. ANPL מחפשת מועמדים חזקים שיצטרפו לקבוצת המחקר.

 פרופ'-משנה אינדלמן השלים את כל תאריו האקדמיים בטכניון: תואר ראשון כפול בהנדסת אווירונאוטיקה וחלל ובמדעי המחשב (2002) ודוקטורט במסלול ישיר בהנדסת אווירונאוטיקה וחלל (2011). את הפוסט-דוקטורט, במכון לרובוטיקה ומערכות נבונות ב-Georgia Tech, סיים בשנת 2014. במקביל ללימודיו בטכניון עבד תקופה ממושכת בפיתוח אלגוריתמים ברפאל, ובמרוצת השנים זכה בפרסים ובמלגות על מצוינות מחקרית.
פרופ'-משנה אינדלמן השלים את כל תאריו האקדמיים בטכניון: תואר ראשון כפול בהנדסת אווירונאוטיקה וחלל ובמדעי המחשב (2002) ודוקטורט במסלול ישיר בהנדסת אווירונאוטיקה וחלל (2011). את הפוסט-דוקטורט, במכון לרובוטיקה ומערכות נבונות ב-Georgia Tech, סיים בשנת 2014. במקביל ללימודיו בטכניון עבד תקופה ממושכת בפיתוח אלגוריתמים ברפאל, ובמרוצת השנים זכה בפרסים ובמלגות על מצוינות מחקרית.
