



מטוס ריסוס חקלאי ללא טייס – iSplane
- מאור דן, אלעד שיסל, יותם ניסנבוים, אסף רחימי, סהר שפיץ, אווה דה בוטון ודניאל איסקוב
- מר שמר שלו

הפרויקט המוצג להלן מציג את תהליך הפיתוח והתכנון של מטוס ריסוס חקלאי שיפעל בצורה אוטומטית (ללא טייס). הפרויקט בוצע בהנחיית מר שמר שלו ובהיוועצות עם גורמים מקצועיים בהם אורן עשת – טייס ניסוי ברת״א, ניר לפידות – טייס כיבוי ראשי בכימניר וינון בהט – טייס ריסוס ראשי בכימניר. דגם המנהרה הודפס ע"י חברת "ארן". מטרת הפרויקט הייתה להראות היתכנות פיתוח וייצור אב טיפוס ראשוני
בשנים האחרונות נעשו מספר נסיונות לפתח מטוסי ריסוס אוטונומיים וזאת כיוון שישנו סיכון רב לחיי הטייסים בזמן הריסוס שדורש מיומנות רבה וביצוע תמרונים מורכבים בתנאי שטח קשים לעיתים, שעות עבודה מוגבלים עקב תנאי מזג אוויר וראות בעייתיים ועוד.
פיתוח הכטב"ם שלנו בא לנסות לפתור בעיות אלו בכך שהוא מתוכנן להיות מסוגל לרסס בכל שעות היום והלילה, המראה ונחיתה אוטומטיים, תמרונים בספרות עומס גבוהות יותר, ריסוס יעיל יותר ובעיקר יפחית את הסיכון לפגיעה בחיי אדם ובסביבה.
לצורך פיתוח הכטב"ם חקרנו את נושא הריסוס החקלאי מהאוויר לעומק תוך היוועצות בגורמים מקצועיים ואפיינו את האתגרים העומדים לרשותנו בפרויקט.
בדו"ח זה מוצג תהליך התכנון והפיתוח של הכטב"ם iSplane החל משלב התכן הראשוני המתבסס על מפרט הדרישות (על בסיס דרישות השוק ממטוסי ריסוס חקלאיים) ועד לביצוע ניסוי מנהרה עם דגם המנהרה הראשוני.
תהליך התכן כלל ביצוע אנליזות אנליטיות ונומריות בתחומי האווירודינמיקה, מכניקת הטיס, הנעה ומבנה וביצוע סימולציית בקרה ממוחשבת למעקב אחר שטח ריסוס מוגדר, תוך ביצוע מספר תמרונים הנדרשים במהלך ריסוס.
כמו כן, הדו"ח מכיל הגדרה של פרופיל המשימה הנדרש על בסיס המנחתים הקיימים בארץ ודרישות הרגולציה של רת"א ושאר הגורמים הרלוונטיים. במהלך הפרויקט נעשה גם ניתוח סיכוני פיתוח ובטיחות לצורך מעקב ווידוא היתכנות הפרויקט. לבסוף מפורט ניסוי המנהרה שבוצע לבחינת נכונות הפרמטרים האווירודינמיים של המטוס.
הדו"ח מפרט את הנושאים הנ"ל בפירוט תוך הצגת גרפים, רקע תיאורטי ומסקנות נדרשות.
בתחילת הדו"ח מובא מפרט הדרישות והצגת בעלי העניין. בחלק זה מפורטים כל הגורמים הרלוונטיים לפרויקט שלנו (הלקוחות הפוטנציאליים, הגופים הרגולטוריים בתחום ודמויות מרכזיות נוספות) עימם עבדנו ובנינו את הבסיס להתנעת הפרויקט על בסיס דרישותיהם. מתוך כך ומתוך סקר שוק שביצענו בנינו את מפרט הדרישות לכטב"ם שלנו כך שיתאים למנחתים הקיימים בארץ.
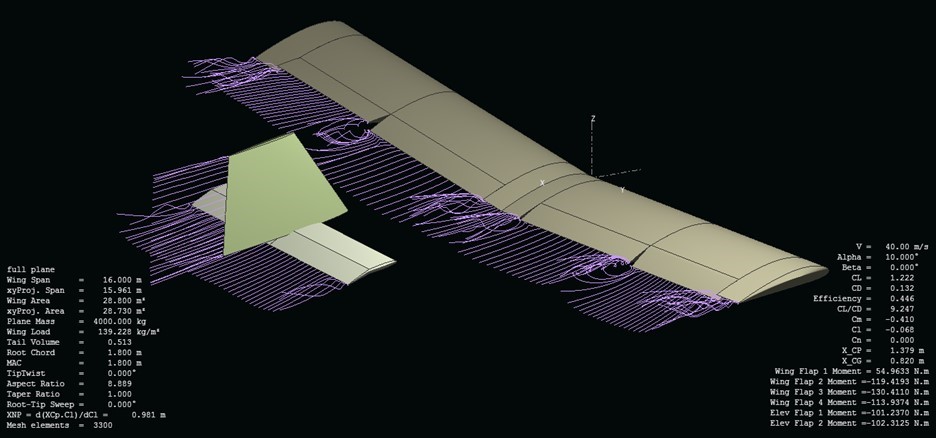
בפרק האווירודינמיקה מפורט התכן האווירודינמי של כל משטחי ההיגוי והעילוי של המטוס תוך נימוק השיקולים שעמדו לנגד עינינו ובחינת החלופות השונות. כמו כן, חישוב המקדמים האווירודינמיים, שישמשו בהמשך לסימולציות וחישוב ביצועי המטוס, בוצע באמצעות תוכנת פאנלים (VLM) בתנאי משימת הריסוס. בהמשך מובא גם ניסוי מנהרה שבדק את עמידות תצורת המטוס בתנאי טיסה שונים ובחינת נכונות המקדמים שחושבו באופן תיאורטי.
בפרק ההנעה והדחף פורטו סוגי המנוע המשמשים למטוסי ריסוס, תוך בחינת החלופות השונות וביצוע השוואה ביניהם לצורך בחירת המנוע המתאים ביותר לכטב"ם שלנו. לאחר מכן נבנה מודל הדחף של המטוס שמאפשר להעריך את הדחף בתנאי טיסה שונים לצורך הסימולציות וחישוב ביצועי המטוס.
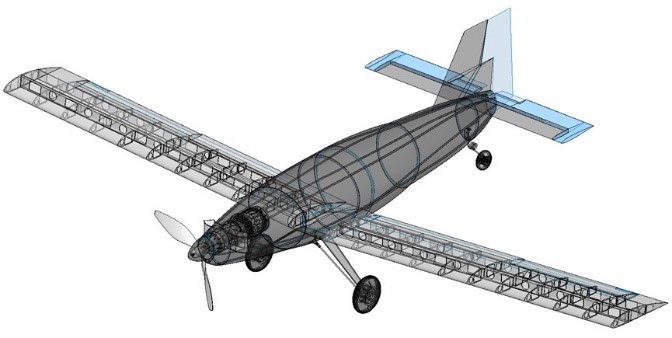
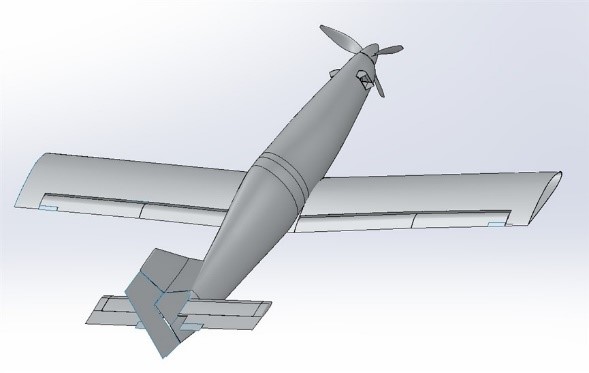
בפרק תכן המטוס התמקדנו בהסבת מטוס קיים למטוס אוטומטי (ולא פיתוח תצורת מטוס חדשה לגמרי, לצורך הימנעות מסיכון פיתוח נוסף). על מנת לקבל רעיון על ממדי המטוס הסתמכנו על ממדיו של ה- Air Tractor 502B ועל פרופיל כנף של NACA-4415. תכנון גוף המטוס ובעצם המטוס כולו נעשה בתוכנת Solidworks לפי גדלים ופרמטרים שחישבנו במהלך שני הסמסטרים ושיתאים לחישובים ולמוסכמות של כלל קבוצות הפרויקט.
בפרק המבנה מבוצעת אנליזת מאמצים לתצורת המטוס לצורך קביעת המבנה הפנימי של הכנפיים, הזנב, משטחי ההיגוי, הגוף ועוד. חישובי החוזק הראשוניים נעשו בעזרת חישובי חוזק אנליטיים קלאסיים ובעזרת תוכנת אלמנטים סופיים Ansys. בנוסף בוצעה אופטימיזציית משקל למבנה.
בפרק חישובי הדלק בוצעו חישובי דלק וטווח על מנת לבדוק אם המטוס עומד במפרט הדרישות.
בפרק מרכז הכובד ומומנטי אינרציה מחושבים מיקום מרכז הכובד, משקלי רכיבי המטוס ומומנטי האינרציה בכל אחד מצירי המטוס לצורך אפיון דינמיקת המטוס הנדרשת לסימולציות השונות.
בפרק בחירת מפעילי הגאים מפורטים השיקולים השונים ובחינת החלופות של המפעילים שישמשו למשטחי ההיגוי של המטוס תוך ביצוע חישובים מתאימים להערכת מומנטי ציר ההגה.
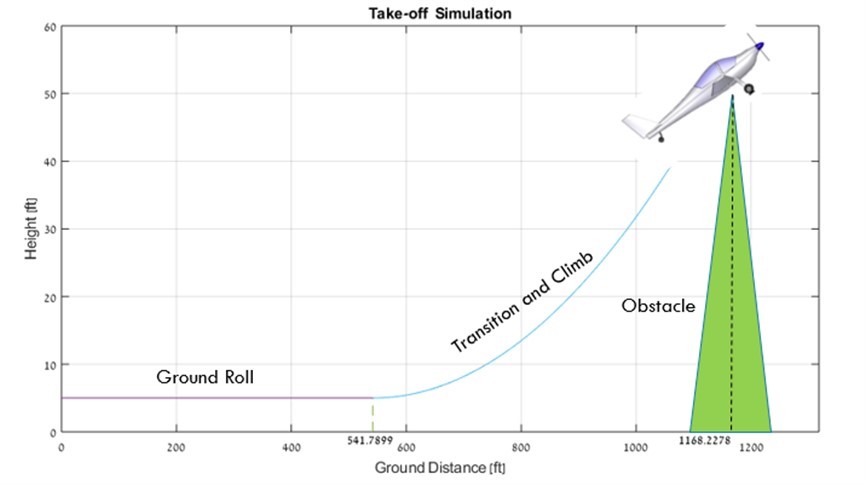
בפרק ההמראה והנחיתה מחושבים ביצועי המטוס בהמראה ובנחיתה בעיקר מבחינת אורך המסלול הנדרש לצורך עמידה במפרט הדרישות עבור המנחתים העומדים לרשותנו. החישובים מתבססים על התכן האווירודינמי של המטוס ועל תצורתו הראשונית מתוך תכן המבנה.
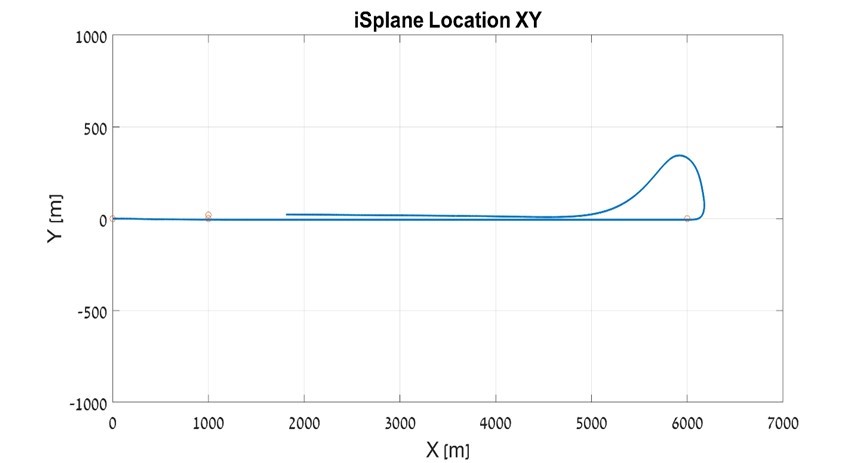
בפרק סימולציית מעקב השטח מפורט החלק העיקרי של הפרויקט המתייחס לבקרת והנחיית המטוס לצורך ביצוע הריסוס בצורה אוטומטית. מטרת סימולציה זו היא ליצור מודל מציאותי עבור המטוס אשר בעזרתו נוכל להעריך את ביצועי ותכן המטוס, למדל את חוגי הבקרה ולבדוק את התאמתם למשימה.
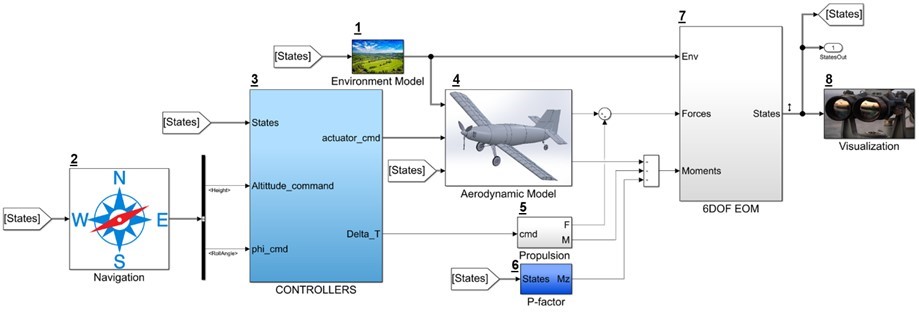
בנוסף למטרת בניית המודל וחוגי הבקרה, על הסימולציה לבצע מעקב אחרי תוואי שטח ולבצע תמרוני מעבר חדים. מודל זה נבנה בשימוש בתוכנות MATLAB ו-SIMULINK על סמך המקדמים האווירודינמיים שחושבו בתכן האווירודינמי. הסימולציה בוצעה בהתחלה עבור טיסה עם שלוש דרגות חופש ובהמשך הורחבה לשש.
לבסוף, מובא ניתוח סיכוני הפרויקט.
כיוון שמדובר בפיתוח טכנולוגי חדש ישנם סיכונים הנובעים מפערי הידע ולכן היה צורך לזהות אותם ולהתמודד עימם במהלך הפרויקט. כמו כן, ישנם סיכונים הנובעים מדרישת הבטיחות הגבוהה מהכטב"ם שעתיד לפעול בסביבה חקלאית ובקרבת יישובים. כל הסיכונים הללו מפורטים בדו"ח יחד עם הדרכים להתמודדות עימם.
