iSplane – Unmanned Agricultural Aerial Application Aircraft
- Maor Dan, Elad Schiesel, Yotam Nissenboim, Assaf Rahimi, Eva De-Botton, Sahar Shpitz, And Daniel Isakov
- Mr. Shemer Slav

The following project presents the design and development process of an Unmanned Agricultural Aerial Application Aircraft. The project was supervised by Mr. Shemer Slav and with the generous help and advise of professionals such as Mr. Oren Eshet – An IAA test pilot, Mr. Nir Lapidot, a “Chem-Nir” chief fire-fighting pilot and Mr. Yinon Bahat – a “Chem-Nir” chief Agricultural Aerial Application pilot.
The project’s main objective was demonstrating possibility of design, development and manufacturing of a preliminary prototype.
Agricultural Aerial Application area of flight require expertise and experience, knowledge and training of the highest rank, conduction of risky and complicated aerial maneuvers, low-altitude flight in proximity to objects and structures, accurate and efficient application.
In recent years, due to the risk and characteristics of this profession brought above, number of design and development trials in the area of autonomous and automatic aerial application flight were conducted.
Our UAV design attempts to offer a solution to many of these complications:
Ability to operate at any hour of the day, for many hours straight and without depending on visibility. Our UAV is designed to conduct relatively high-G maneuvers, very efficient and accurate computer-guided application and on top of everything – minimizing the risk to human life.
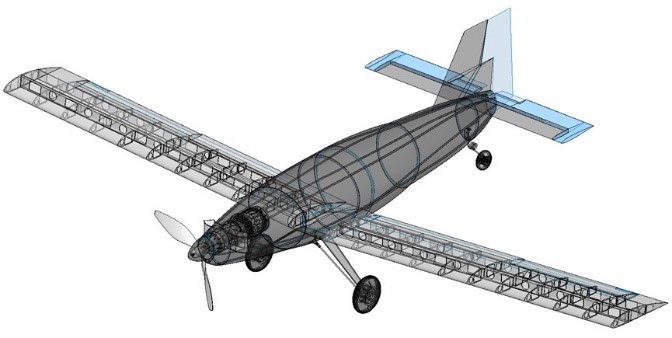
In this report we present the research and development process of the iSplane UAV – beginning with the preliminary aircraft design based upon the requirements description ( brought up by our main clients ) and to the conduction of wind-tunnel experiment using our 3-D printed prototype model.
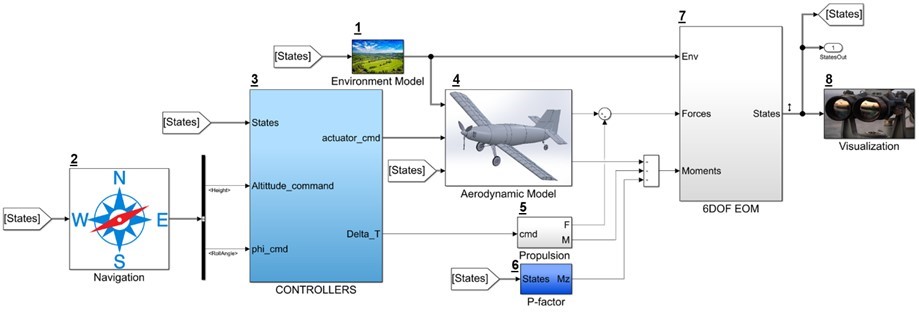
The design process included analytical and numerical analysis in the fields of aerodynamics, flight mechanics, propulsion and structure, using multi-disciplinary computer software such as Matlab, Simulink and Solid-Works.
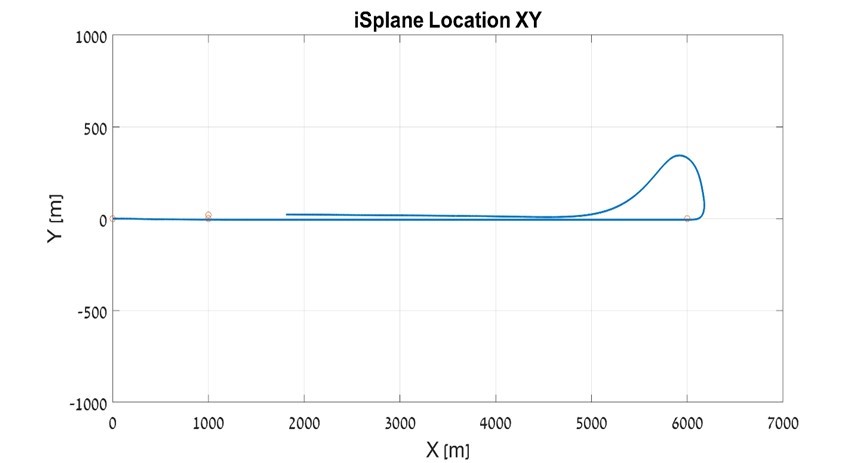
In addition, Our team developed the entire control simulation for the aircraft for tracking specified application surfaces, maneuver and flight control.
The final report includes mission profile definition required and based upon airports available in Israel and the regulation requirements presented by the Israeli Aviation Authority ( IAA ).
During the project, development risk and safety analysis were conducted in order to track and ensure the project possibility.
At the end of the project report, we brought the wind-tunnel experiment requirements, process and conclusions.
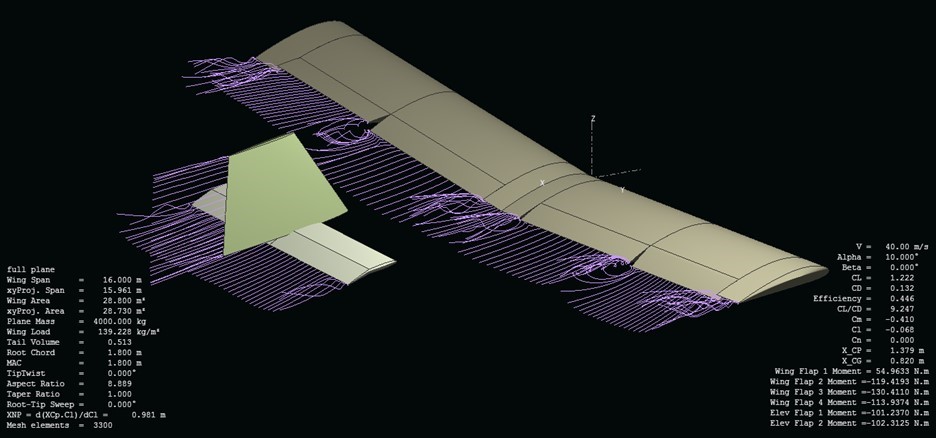
In the Aerodynamics chapter, the aerodynamic designs of every lift and control surface are brought, including elaboration of the decision making and different ideas brought during the project. The Aerodynamic coefficients calculation, later used for the control software, were made using aerodynamic lattice software ( VLM ) considering the aerial application terms and our main clients requirements.
The wind-tunnel experiment conducted later put those calculations to the test.