כטב"ם אוטונומי סילוני-Aeoluse
- ראש הפרוייקט- יותם נורמן, צוות אווירודינמיקה- אביחי בוכריס ואייל דדו, צוות תכן- חגי בן ישראל, צוות הנעה- אריאל קולפקצ'י ורוני בראל, צוות בקרה וסימולציה- קורל יזראלוב ויותם נורמן, צוות אינטגרציה ולוגיסטיקה- אביחי בוכריס ואייל דדו
- מר שלמה שפונד
- הנעה סילונית- מר שמעון צרף, מערכות בקרה ואוויוניקה- מר דן סולודקי, תכן-יהונתן בורגנסקי
פרוייקט Aeolus הוא פרוייקט ארבע-שנתי רב מערכתי המבוצע על ידי סטודנטים בשנתם הרביעית מהפקולטה להנדסת אווירונאוטיקה וחלל בטכניון- המכון הטכנולוגי לישראל, בשיתוף פעולה מלא עם מפאת ורפאל.
מטרת העל של הפרוייקט הוא הוכחת היתכנות וייצור של כטב"ם אוטנומי מהיר המנוע ע"י מנוע סילון.
דרישות תכן עיקריות:
- תצורה "פשוטה" – שימוש בכלי תכנון בסיסיים
- מהירות טיסה 0.2 עד 0.5 M
- יציבה סטאטית ודינאמית
- המראה\נחית אוטונומית על גלגלים
- זמן טיסה כולל של 15 דק'
- פניות מיוצבות של עד 2g
- ביצועי פניה אנכיים בטווח בין -1g ל-3g
בשנה הראשונה לפרוייקט נבחרה תצורה ראשונית שעל פיה יתבסס כל פיתוח עתידי בהמשך העבודה.
ההחלטות המרכזיות שהתקבלו:
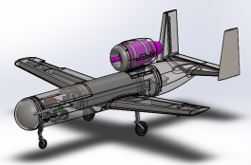
- מיקום המנוע מעל גוף הכטב"ם. (מעל ומקביל לציר האופקי)
- גוף צלינדרי לתכן פשוט וומזעור הגרר ככל האפשר
- בשל מיקום המנוע הייחודי נבחרה תצורת זנב 'H' על מנת למנוע מפליטת הסילון לפגוע בזנב.
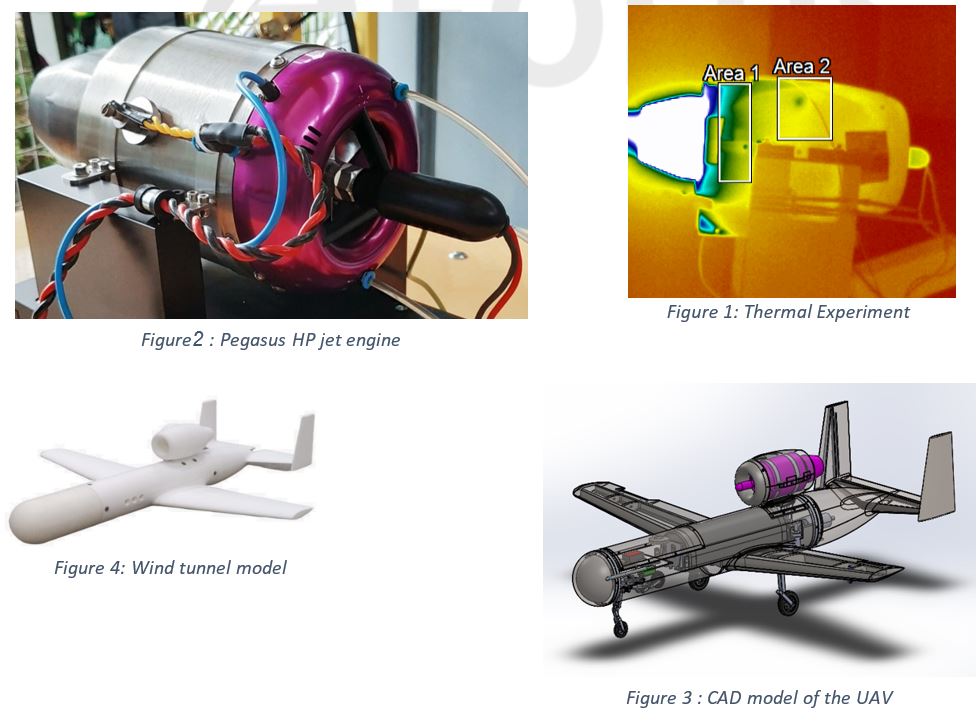
לאחר שהתצורה הראשונית נקבעה, יוצר מודל לניסויים סטטים במנהרת רוח. באותה השנה נבחרו וניקנו סט מנועי סילון מחברת AMT בהולנד: מנוע Pegasus HP נבחר לשמש את המוצר המוגמר ומנוע Olympus HP למטרות לימודיות.
בשנה השנייה לפרוייקט תהליך התכן נמשך והתמקד בשכלול המודל האווירודינמי לאחר עבודה ראשונית במנהרת הרוח, תכנון מחדש של הכנף ותחילת תכן הגאיםובדיקתו בניסוי הגאים. מידול התקדם לשלב התכן המפורט, החלה התקשרות עם מגוון יצרנים לתחילת שליחה לייצור של מגוון רחב של חלקים שסיימו את שלב התכן המפורט. נבנתה פלטפורמה למערך ניסויי המנועים והושג דק מנוע מעודכן לאחר הרצת סימלוציה ומודל חיפוי אווירודנמי למנוע. במקביל לכך נבנת סימולציה הטסה ראשונית סימולצית המראה ומודל הנחיה ראשוני.
בשנה האחרונה להבדיל מהשנים האחרונות התווסף צוות נוסף- אינטגרציה ולוגיסטיקה מכיוון והפרוייקט כולו התקדם מאוד בשלב התכן המפורט והחלו שלבי אינטגרציה ויצירת מדגימים להוכחת ייתכנות תכן מנגנונים והפעלתם באמצעות מחשב הטיסה .PIXHAWK 4 בנוסף התווסף למודל התכן המבצעי תכן כני הנסע והחלה העבודה על תכנון ניסוי להוכת חוזק המנגנון. השנה הושלם המודל האווירודינמי והתכן האווירודינמי לאחר שיכלול המודל משנה שעברה. יתר על כן בוצע מספר רב של ניסויים במנוע המבצעי של הפלטפורמה כחלק אינטגרלי מתהליך האינטגרציה והוכחת התכן של חיפוי המנוע בהיבטים תרמיים, ביצועיים ותכן כשבסיום התהליךהחומר שנבחר לייצר ממנו את החיפוי הסופי הינו אולתם.
במקביל לעבודת התכן הושגה התקדמות בשכלול סימולציית 6 דרגות החופש על ידי מידול המדידים והסרוואים. בנוסף פותח תרחיש הנחיתה והן סימולציית הנחיתה, בנושא ההמראה נבחנו מספר אפשרויות. בנוסף, הושגה התקדמות בדיסקריטיזצית הבקרים הרציפים והחלה העבודה על פיתוח הקוד המבצעי.
ההישגים המשמעותיים בפרוייקט עד נקודת זמן זאת:
- סיום המודל האווירודינמי ומודל התכן האווירודינמי כך שמתכתב עם דרישות הפרוייקט
- התקדמות משמעותית בתכן המפורט של כל מכלולי כלי הטיס
- השלמת תהליך אינטגרצית חיפוי-מנוע
- השלמת ניסויי מצב טרנזיינטי במנוע המבצעי Pegasus HP
- השלמת ניסוי מידול סרוו
- פיתות סימולציית נחיתה והמראה
- הוכחת תכן מדגימי מנגנונים (בינהם: כני נסע והגאים) והפעלתם באמצעות מחשב הטיסה
- יצירת פרוטוקול כיל לסרוואים.