



Aeolus – כטב"ם סילוני אוטונומי
- ראש פרויקט והנ' מערכת – אוראל לאופר, צוות אוירודינמיקה – יאן פרנט ופבל קובליוב, צוות תכן ומבנה – יהונתן בורגנסקי, ג'ישואן ליו ולב דרגילב, צוות הנעה – רותם בן דוד ואלכסנדרה קבורט, צוות בקרה וסימולציה – אוראל לאופר ואסף דניאלי
- מר שלמה שפונד
- הנעה – דר' שמעון צרף , בקרה ואויוניקה – מר דן סולודקי
פרויקט Aeolus הינו פרויקט רב מערכתי ארבע שנתי עבור סטודנטים בשנה האחרונה ללימודיהם בפקולטה לאוירונאוטיקה וחלל בטכניון – מכון טכנולוגי לישראל, בשיתוף פעולה מלא עם מפא"ת ורפאל. הפרויקט עוסק בתכנון והבאה לכדי יכולת הטסה אוטונומית לחלוטין של כטב"ם מהיר המונע ע"י מנוע סילוני.
דרישות התכן העיקריות:
- יכולת טיסה במהירות של עד מאך 0.5
- שיוט בטווח מהירויות שבין 0.2 ל-0.4 מאך
- זמן טיסה מינימלי של 15 דקות
- יכולות תמרון אנכי בתחום תאוצות שבין -1g ל-3g
- תמרון אופקי מקסימלי של 2g
- נחיתה בטווח המהירויות: בין 30 ל-40 מטר לשנייה
- חרטום עגול לטובת התקנת מטע"ד עתידי
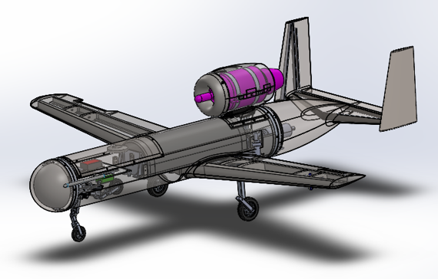
בתחילת הפרויקט נבחרה התצורה הראשונית עליה התאפיין כל התכנון שבא לאחר מכן, ההחלטות המרכזיות עבור התצורה הראשונית:
- בחירה ומיקום מנוע סילון מעל ציר האורך של הכטב"ם,
- צורת גוף גלילית וכני נסע מתקפלים למזעור תרומתם לגרר,
- זנב בקונפיגורציית "H" למניעת הימצאותו בנתיב סילון המנוע
בהמשך, תוכנן דגם מנהרה ראשוני ונבדק בניסוי במנהרת רוח. בשנה זו נרכש המנוע הנבחר Pegasus HP בעל ביצועים גבוהים מאוד ביחס למשקל הכטב"ם. כמו כן נרכש גם מנוע נוסף לצורכי לימוד – Olympus HP. שני המנועים מתוצרת חברת AMT Netherlands.
בשנה השניה נמשך התכן מנקודה זו לשיפור התצורה האוירודינמית וביצוע בדיקות במנהרת הרוח למיפוי ביצועי ההגאים, יחד עם הערכת ביצועיהם בסימולציות ייעודיות להטסה והמראה. נוסף על כך, הוקמה במעבדה להנעה סילונית בטכניון, עמדה לבדיקת ביצועי המנוע המתוכנן לשימוש בעתיד, במיוחד עבור פרויקט זה.
המשקל הכולל של הכטב"ם כ-15.5 ק"ג
האורך הכולל (גוף והזנב) : 1,360 מ"מ
מוטת הכנפיים: 1,498 מ"מ
מודל הכטב"ם נבנה בתוכנת SolidWorks ובאמצעותה הוערכו התכונות האינרציאליות של התצורה וזיווד הרכיבים הפנימיים. בוצע תכן מפורט על מגוון רחב של רכיבים, ביניהם מפעילי הסרוו להגאים וההגאים עצמם, כני הנסע, מכלול הכנפיים והזנב, חיפוי אוירודינמי למנוע כולל אנליזות מעבר חום וגמר תכנון מערכת הדלק ע"י סטודנט לתואר שני.
המשימה של הכטב"ם מנוהלת ע"י קלט המשתמש למחשב ה-Pixhawk הממוקם בקדמת המטוס – בו צרובות ארכיטקטורות הבקרה וההנחיה המשמשות אותו לטיסה אוטונומית, אלו נבדקו והוכחו גם כן בסימולצית הטסה מלאה של 6 דרגות חופש אשר נבנתה בתוכנות Matlab ו-Simulink.
הישגי הפרויקט העיקריים עד לנקודה זו:
- גיבוש תצורה אוירודינמית העונה לדרישות הפרויקט.
- תכן מפורט עבור רוב חלקי הכטב"ם.
- מודל מפורט של הכטב"ם ורכיביו ב-Solidworks.
- נרכשו ערכות מנועי הסילון ואויוניקה נוספת הכוללת: מחשב Pixhawk IV, מקלט GPS, מפעילי סרוו, כני נסע ועוד.
- בוצעו ניסויי בחינת ביצועים למנוע ה-Pegasus HP.
- הוקמו סימולציות לבחינת ביצועי הכטב"ם וארכיטקטורות עם אפשרות להרחבה.
- ארכיטקטורות חוג בקרת גובה וחוגי הנחיה על סמך נתוני GPS, חוגי בקרת איפוס כוח צד ,פניה מתואמת, קצב סבסוב ומהירות על סמך נתוני מדידי תאוצה וג'ירוסקופ מובנים במחשב ההטסה ומדיד פיטו למדידת מהירות.



