



Aeolus – Autonomous Jet-Powered UAV
- Head of project & System Eng. – Orel Laufer, Aerodynamics team – Yan Frant & Pavel Kovalyov, Design & Structure team – Yehonatan Burgansky, Zhixuan Liu & Lev Dragilev, Propulsion team – Rotem Ben-David & Alexandra Kvurt, Control systems & Simulations team – Orel Laufer & Asaf Danieli
- Mr. Shlomo Shpund
- Jet propulsion– Dr. Shimon Saraf, Control systems & avionics– Mr. Dan Solodky
Aeolus project is a four-year multi-disciplinary project conducted by senior undergraduate students of the faculty of Aerospace engineering in the Technion – Israel Institute of Technology, in full collaboration with MAFAT & Rafael.
The project’s ultimate purpose is to design and bring into flight capability of a fully autonomous, jet-powered UAV.
Main design requirements:
- Maximal Mach number of 0.5
- Cruise Mach number range of 0.2 to 0.4
- Minimal flight time of 15 minutes
- Horizontal Maneuver capabilities up to 2g
- Vertical Maneuver capabilities from -1g to +3g
- Landing Velocity between 30 to 40 m/s
- Round nose for future payload accommodation
In the beginning of the project an initial configuration has been chosen on which all the future development has been based later on. The main decisions that were carried over:
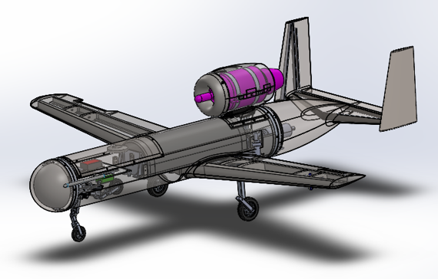
- Choice of an Off the Shelf jet engine and position it on top of the UAV (above and parallel to its horizontal axis),
- Cylindrical body shape with contractible landing gear for minimal drag contribution
- “H” shape tail in order to avoid jet stream from engine to interact with tail surfaces
After the initial configuration was set, a model was manufactured for a static test in a wind tunnel. In the same year the chosen jet engine set was purchased from AMT Netherlands: Pegasus HP to be mounted on the final product and Olympus HP for educational purposes.
During the second year the design process continued and focused mainly on refining the aerodynamic configuration after the first wind tunnel session. Then, a second iteration for the static test and mapping the performance of the control surfaces was performed, after the static configuration met the design requirements.
All that with full performance evaluation performed by running designated simulations for flight and takeoff. Furthermore, a jet engine performance test station was built in the Technion’s jet propulsion lab principally for this project’s purposes.
The UAV weight is about 15.5 kg . Body with tail length – 1,360 mm and it’s wingspan is 1,498 mm.
A full CAD model of the UAV was prepared using Solidworks CAD program, in which the inertial parameters and avionic components positioning were evaluated. Detailed design was conducted on most of the critical components of the UAV, among them regarding the servo motors and their respectable control surfaces, landing gears, wing & tail assemblies, aerodynamic cowling for the engine including heat transfer analysis and completion of the fuel tank system design by a master’s degree student.
.
The mission of the UAV is managed by the input of the used to the Pixhawk IV computer positioned in the front of the aircraft. The Pixhawk will have all the control and guidance architectures built into it for autonomous flight. All that was tested and proven in a 6DoF flight simulation using Matlab & Simulink programs.
The main project’s achievements up to this point:
- Established a full Aerodynamic configuration that meets the project’s requirements.
- Detailed design done for most of the aircraft’s components.
- Full detailed modeling of the UAV in Solidworks.
- Jet engine sets were purchased as well as avionic parts including: Pixhawk IV flight computer, GPS receiver, servo actuators, landing gears, etc.
- Performance tests on the Pegasus HP jet engine were conducted.
- Performance evaluation simulations were built with option for model expansions.
- Altitude control and guidance loops relying on GPS measurements, side-force damping, coordinated turn, yaw rate and velocity control loops based on accelerometers & gyroscopes built in the flight computer together with pitot probe for velocity measurements.



