



DRIVESAT לווין מדגים טכנולוגיה
- ניקיטה קזובסקי, תומאס פרידמן, אלון האן, מור גלעד,אריג' עוידה, דנה בן-ברוך, כרמל פוליקמן, מעיין סגמן.
- יעקב הרשקוביץ

מבוא
Drivesat הוא פרויקט סטודנטיאלי אשר מטרתו להדגים מספר טכנולוגיות מתקדמות במערכות ה-cubesat: הראשונה, מערכת הנעה חשמלית VAT Fig 2המבוססת על קשת הנוצרת בין קאטודה לאנודה. השנייה, גלגל מומנטום MW אשר מבוסס על כונן קשיח Fig 3. בשנה זו שהיא השנייה לפרויקט הצוות שלנו התקדם כברת דרך לצורך מימוש המשימה. צוות ההנעה עשה צעדים גדולים בבדיקות האינטגרציה בין המנוע לבין מערכת המחשב המוטס (OBC). צוותים אחרים התמקדו בפרופיל המשימה בחלל ותכן הניסויים. צוות הבקרה יצר אלגוריתמים רובסטיים לזיהוי ובקרה על המצב הזוויתי של הלווין במצבי הטיסה השונים. צוות המבנאות ווידא שהמבנה והרכיבים ופעלו בצורה תקינה במהלך השיגור והטיסה.
בשנים האחרונות אנו רואים עלייה דרמטית במספר מערכות מסוג קיובסאט שנמצאות בחלל, כאשר יותר מ 1200 שוגרו לפני 2019. למרבית הננו-לוויינים אין מערכת הנעה שעונה על צרכיהם בגלל מגבלות הגודל והמשקל הנוקשות שלהם. כרגע לוויינים אלה אינם יכולים לשלום במסלול שלהם ואינם יכולים לתקן שגיאות בכניסה למסלול או לפצות על דעיכת המסלול כתוצאה מהפרעות וגרר מה שמגביל את זמן המשימה שלהם. המטען הראשי של Drivesat הוא מנוע האמור לתת מענה לצרכים אלה של ננו-לוויינים. המטען השני הוא מערכת גלגל מומנטום אשר מטרתו להעניק ללוין יציבות בסחרור. גלגל מומנטום זה (MW) מבוסס על כונן קשיח של מחשב סטנדרטי אשר עונה על צרכי המשימה אבל במחיר ההרבה יותר נמוך מהמוצרים המסורתיים.
מערכת הנעה
VAT מנוע קשת מיניאטורי המוזן בבורג אורכי. הוא מנוע פלזמה אשר מפותח במכון אשר לחקר החלל. המנוע מספק דחף עד 22 מיקרו ניוטון וצורך 2.6W כל כרטיס מכיל שני מנועים כך שללוין Drivesat יש 4 מנועים. כל כרטיס שוקל 200g ותופס נפח של 1/4U הלווין ישתמש במערכות הנעה אלו כדי לשמור על הכוון וגובה המסלול.
גלגל מומנטום MW
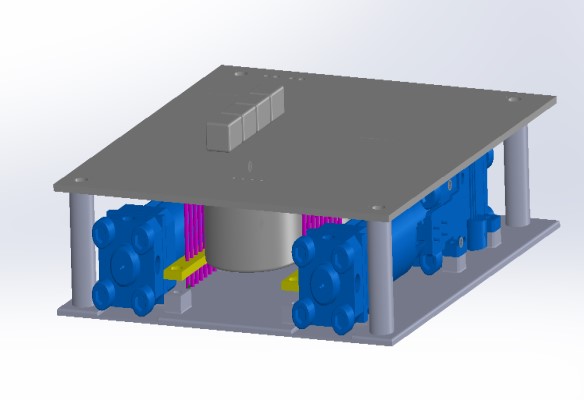
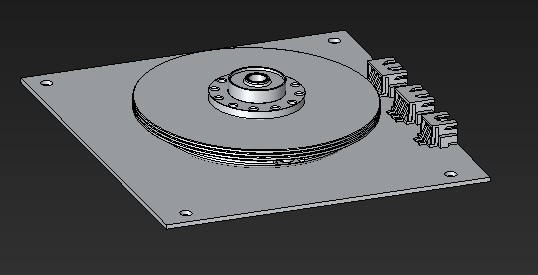
המטרה השנייה של ה Drivesat היא להוכיח את היכול שלנו להשתמש בגלגל מומנט אשר מבוסס על כונן קשיח של מחשב. הפרויקט הוצע ע"י מכון אשר לחקר החלל ומבטיח להוזיל בהרבה את עלות מערכות אלה. כידוע כונן קשיח של מחשב מורכב מדיסק אשר מסתובב במהירויות של חמש עשרה אלף סל"ד ועשוי בסטנדרט גבוהה אנו מאמינים שניתן לבצע שינויים קלים לתכן של הכונן ולקבל מערכת מספיק טובה אשר תאפשר ללוויין שלנו לבצע בקרת הכוון בציר אחד. Drivesat יעשה שימוש במגנטורקרים לביצוע בקרת הכוון בצירים אחרים וגם לצורך יתירות רכיבים.
ניסוי אינטגרציה
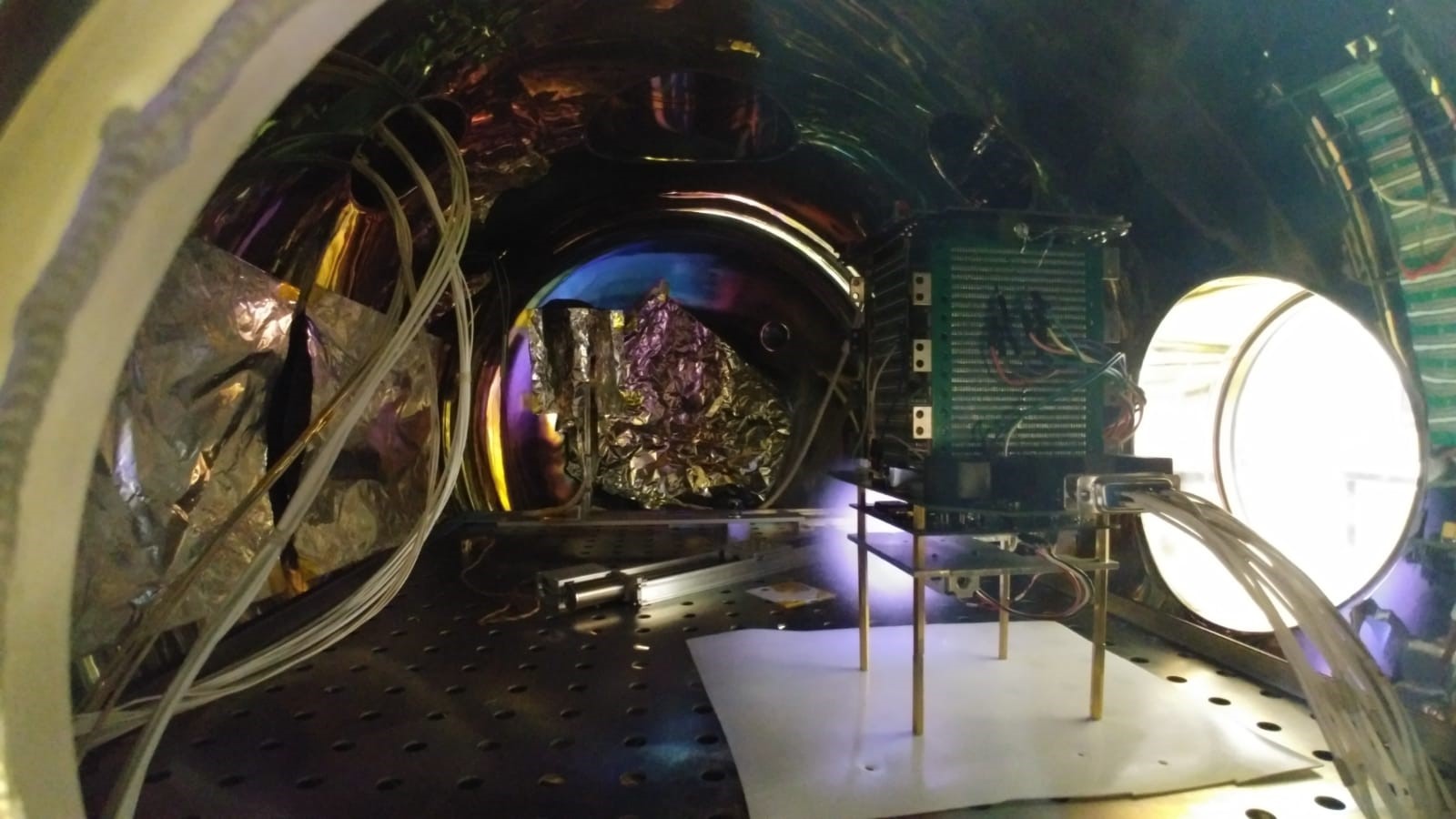
ה-VAT מייצר שדות מגנטיים חזקים במהלך פעולתו. שדות אלה עלולים להפריע לפעולת רכיבים אחרים בלוויין. לכן, קיים סיכון שהמחשב המוטס יבצע אתחול ברגע הפעלת המנוע. כתוצאה מכך, קיים צורך לבצע ניסוי על הקרקע שבו מדמים את תנאי הטיסה ובודקים את השפעת המנוע על המחשב. לצורך זה ביצענו ניסוי אינטגרציה. במהלך הניסוי הכנסנו את המנוע והמחשב לתא ואקום Fig 4 הפעלנו את המנוע כאשר המחשב מריץ תוכנה ייעודית שמטרתה לתת לנו אינדיקציה על "בריאות" המחשב ובו זמנית פוקד על המנוע. במהלך הניסוי המחשב אינו ביצע אתחול ולכן הסקנו שסכנה זו אינה משמעותית. הניסוי חולק ל 4 חלקים:
- ספק אנרגיה חיצוני, ללא הערקה משותפת
- ספק אנרגיה חיצוני, הערקה משותפת
- ספק אנרגיה פנימי, הערקה משותפת
- ספק אנרגיה פנימי, ללא הערקה כלל
מתוך הנתונים שנאספו במהלך הניסוי ניתן לראות שבזמן שהמערכת מחוברת חשמלית לתא הוואקום קיים רעש משמעותי באות. אולם, במערכת צפה הרעש הוא מזערי. הדבר מעיד כנראה שמקור הרעש הוא ציוד המדידה. הניסוי הוגדר הצלחה מכיוון שהמנוע לא הפריע לפעולת המחשב במצב הקרוב ביותר לסביבת החלל שיכולנו לייצר.
מערכת בקרת ההכוון
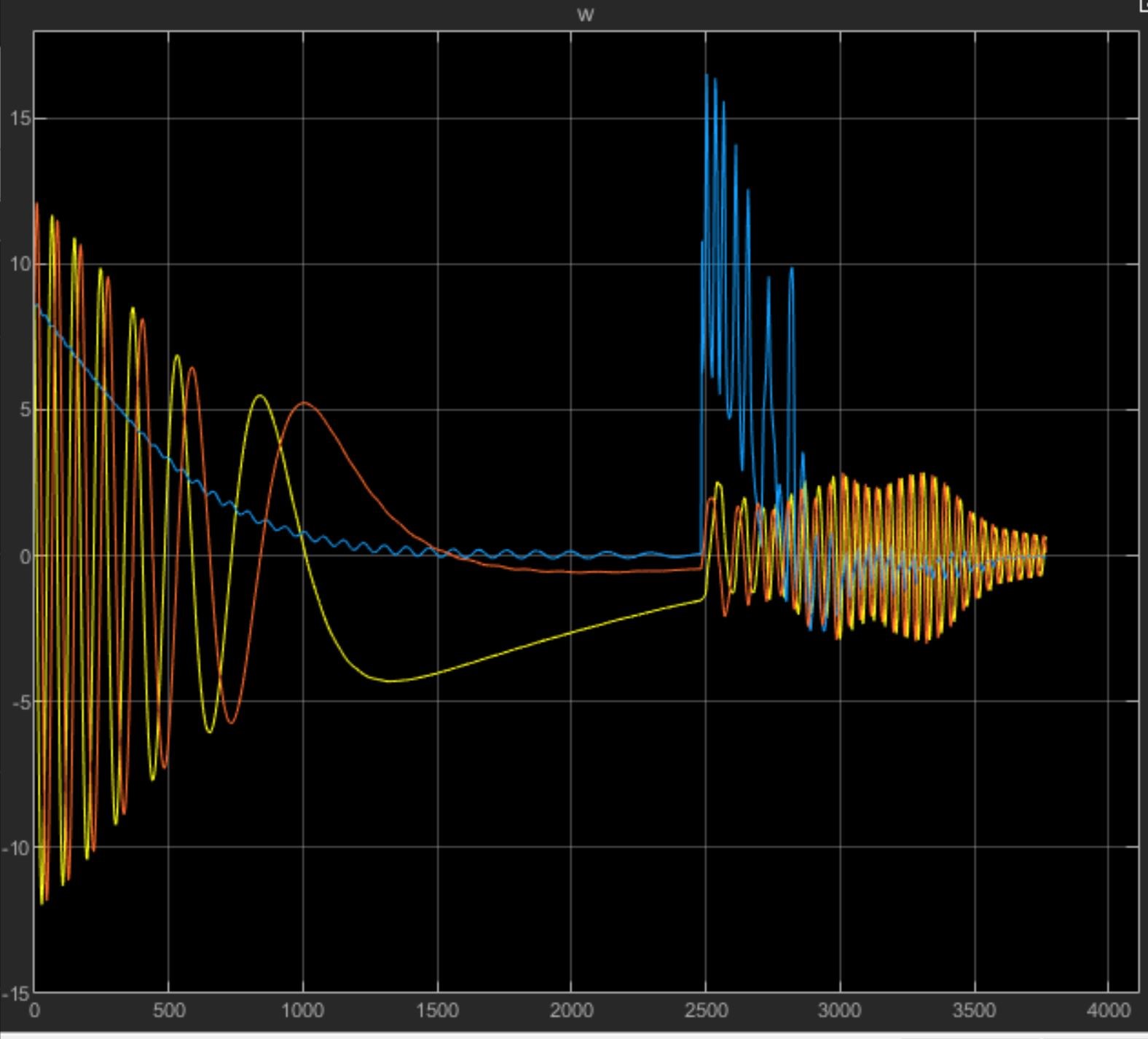
הצוות התמקד ביצירת אלגוריתמים אשר ניתן לצרוב לחומרה המוטסת. האלגוריתמים חייבים להיות מקיפים מספיק כדי לפעול בכל מצבי הטיסה. הצוות הצליח ביצירה ובדיקה של מספר מצבי בקרה. כולל מצב “detumble” המצב הראשון שניתקל בו במהלך הטיסה. במוד זה הלווין משתמש במגנטורקרים על מנת לעצור את כל המהירויות הזוויתיות. לאחר מכן, מצב שמירת שמש אשר מטרתו למקסם את ההספק החשמלי לנוצר מהתאים הסולריים. שני המודים האחרונים מאפשרים את ביצוע הניסויים לצורך הוכחת הטכנולוגיה עיקר תפקידם הוא לשמור על ווקטור הדחף להיות בכיוון ווקטור המהירות. כל המודים מומשו ונבדקו כאשר החיישנים והמפעילים מכילים הפרעות. תוצאות המהירות הזוויתיות בסימולציה של מצב detumble ולאחר מכן מצב שמירת שמש מוצגים ב Fig 5.
משערך
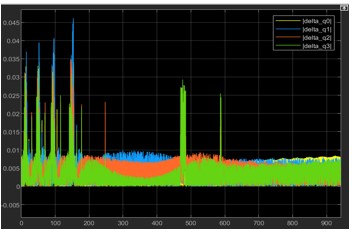
חלק ממשימות צוות הבקרה היה ליצור משערך רובסטי לצורך זיוהוי ההכוון הזוויתי של הלווין בתור קלט למערכת בקרת ההכוון. המשערך חייב להיות מהיר מספיק כדי להיות רלוונטי לצורך בקרה בזמן אמת ומדויק מספיק כדי לעמוד בדרישות הדיוק של בקרת ההכוון. השגיאות חייבות להיות נמוכות מ0.1 מעלות בזווית ההכוון ו פחות מ 0.1 מעלות לשנייה של מהירות זוויתית. המשערך חייב להיות בעל זמן התכנסות של פחות מ 0.05 שניות. הצוות עשה שימוש באלגוריתם UKF נעזר SVD כדי להשיג את תוצאות המוצגות Fig 6. האיור מציג את שגיאת המשערך כאשר על האות מוסיפים רעש לבן.
מבנה
מטרת הצוות הייתה לוודא שהלוויין ומערכותיו יעמדו במאמצים הפועלים עליו במהלך השיגור על טיל ה-VEGA . וכן, לאחר ההיפרדות מהמשגר וחשיפה לנאי הסביבה של החלל. הצוות התמקדת בתנאי הטמפרטורה בחלל ווידא שאף רכיב לא ייצא הגבולות הטמפרטורה הרצויים לתפקוד מלא. לצורך זה הצוות השתמש בתוכנה ANSYS WB בגרסת סטודנט כדי לבצע ניתוח אלמנטים סופיים על רכיבים שמתוכננים ע"י הפרויקט וגם על המערכת המלאה. הצוות ערך ניתוח מאמצים סטטיים על התאוצות במהלך השיגור וגילה שהמאמצים נמוכים. לאחר מכן נערכו ניתוחים על מודים עצמיים ותגובות הלם במהלך השיגור ונמצא שהלווין אינו נמצא בסכנה של רזוננס. בנוסף המאמצים במבנה הלווין כתוצאה מהלך נמוכים ממאמץ הכניעה של החומר במקדם בטיחות של 3.
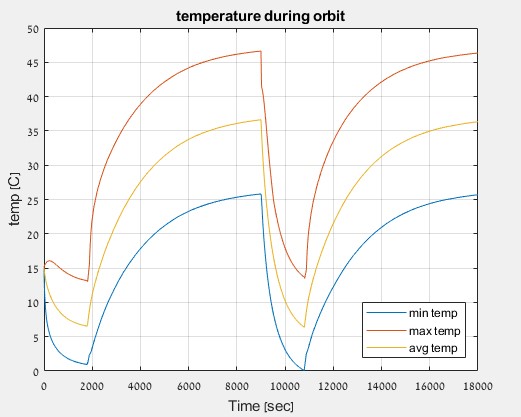
לאחר ניתוח מודאלי של המערכת בוצע אנליזה טרמית של הלווין במהלך השהייה בחלל. הצוות התחשב בהספק החום מן השמש וכדור הארץ. בנוסף, החום עובר בין הרכיבים בלוויין גם בהולכה וגם בקרינה. לבסוף בוצעו סימולציות דינמיות של 2 מסלולים אחד אחרי השני והטמפ' של כל רכיב נרשמה בגרף. נמצא שבמהלך השהייה במסלול כל הרכיבים נשארים בתוך טווחי הטמפ' המומלצים ע"י היצרן. התוצאות מוצגות ב Fig 7.
סיכום
צוות הפרויקט התקדם השנה בצורה משמעותית לטובת השלמת התכן של הליין. רוב העבודה הייתה מעבר למה שניתן לתאר כאן. הפרויקט עדיין רחוק מסיום ויש עוד עבודה רבה בעיקר בנושאי האינטגרציה והתקשורת. בכל זאת, באזורים רבים ניתן כבר להתקדם ולעבור לשלבי הרכישה וניסויים על הקרקע. הפרויקט הוא הזדמנות מצוינת ללמידה על תכן מערכות חלל ומערכות מורכבות באופן כללי. בנוסף, לטכנולוגיות המעורבות בפרויקט יש פוטנציאל גדול להשפיע על תעשיית הננו-לוויינים כולה.
