



פרוייקט A3TB
- אריאל מאיר, קאי לוינסון, רועי שכטר, נעם יחיאלי, דור נפתלי, גיא לוי, אריאל קנטור, ליאל ארזני
- ד"ר לוסי אדרעי-אזולאי

פרוייקט "כנף אווירואלסטית" A3tb Active Aeroelastic Aircraft Testbed, עוסק בפיתוח, מימוש והדגמת יכולות אוירואלסטיות ובניית מדגים אשר יוכל לשמש כפלטפורמה למחקרים עתידיים בתחום עבור הלקוחה, פרופ' דניאלה רווה.
הפרוייקט מוגדר לשלוש שנים. תוצר הפרויקט יהיה מל״ט בתצורת כנף מעופפת (flying wing) גמישה במיוחד בעל יכולות של:
- בקרת צורה ועומסים בטיסה סטטית
- יכולת דיכוי פרפור ובקרת עומסים דינמיים
- חישת צורה ותכונות דינמיות באמצעי חישה מתקדמים
- בקרה באמצעים מתקדמים
בסוף הפרויקט יהיו בידינו מודלים מפורטים ומכוילים של הדגמים אשר יוכלו לשמש, יחד עם המדגים עצמו, למחקר עתידי בתחום טכנולוגיות אוירואלסטיות.
המוטיבציה לפרוייקט: השאיפה לכלי טייס יעילים (ארוכי טווח ובעלי צריכת דלק נמוכה) מובילה לתכן קונפיגורציות עם כנפיים בעלות מנת ממדים גדולה ומבני כנף קלי משקל. המגמה נכונה למטוסי תובלה ומטוסים צבאיים ובעיקר למטוסים ללא טייס. קונפיגורציות כאלו הן בהכרח גמישות יותר מאלו של מטוסים נוכחיים, בעלי כנפיים סמי-קשיחות. הקשחתם המבנה מתבטאת בתוספת משקל; תכנון מטוסים גמישים יאפשר הורדת משקל, ואפשרות לתכנון בריבוי דרגות חופש, המאפשר תכנון לביצועים אופטימאליים. עבודות ראשוניות בתחום זה הוצגו ע"י חברות התעופה והמחקר המובילות בעולם כגון NASA, LM. יחד עם זאת, התחום הינו בוסרי לחלוטין ונידרשת למידה וחקירה משמעותית עד להוכחת יכולת חיזוי ושליטה בתופעות האוירולסטיות (עיוותים, תמרונים ומטענים, …), ובחינה לתכנון ביצועים אופטימליים.
פלטפורמת A3TB היא כלי טיס מתצורת כנף מעופפת, בעלת מנת ממדים של 8.4, מיתר כנף כשלושה מטרים ומשקל של כ-11 ק"ג. לכלי הטיס יש מערכת הנעה חשמלית והיא נשלטת על ידי שמונה משטחי בקרה בשפת הזרימה, ארבעה בכל כנף.
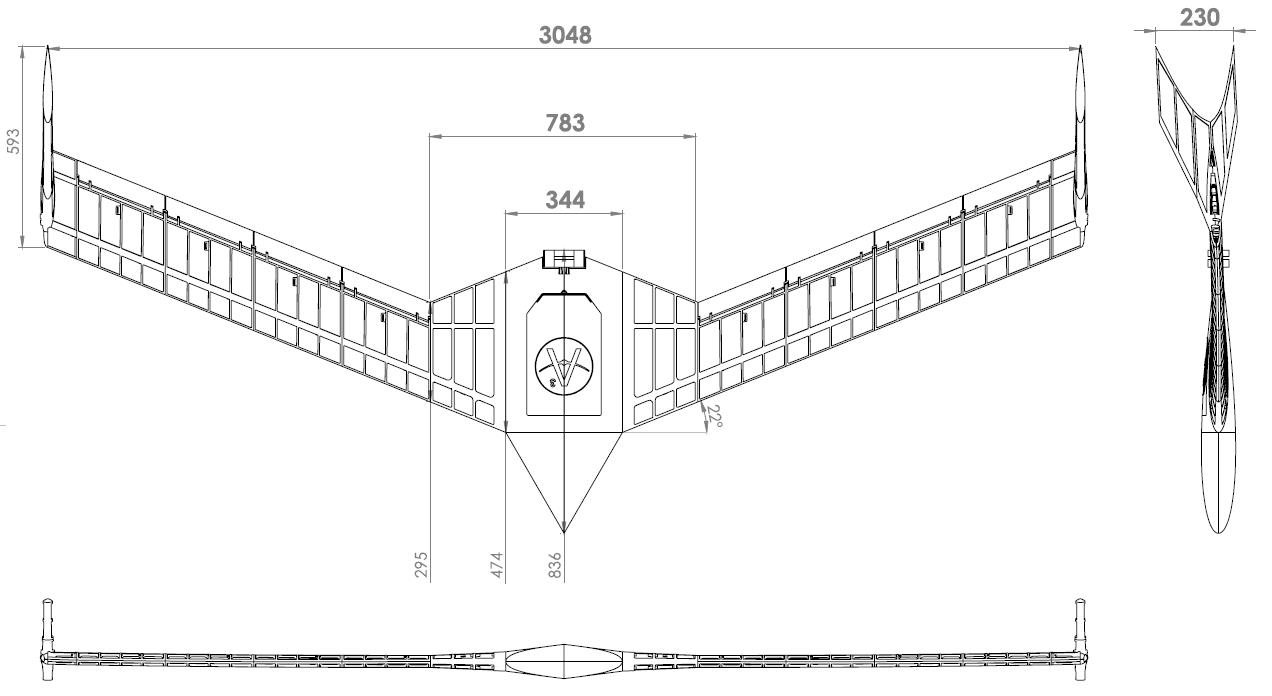
המבנה: קורה ראשית, קורה משוכבת מקרבון באדיבות כנפית 3D, אליה "מושכלים" שישה סגמנטים בכל צד. כל המטוס (למעט הקורה הראשית) עשויים בהדפסה על בסיס ניילון 12, גןדל החלקים מותאם לגודל תא ההדפסה ומאפשר פירוק והרכבה מהירה. הכנף משוכה לאחור בזווית של 22 מעלות ועם זווית פיתול washout של שלוש מעלות. פרופיל הכנף הוא NACA0012. בקצה הכנפיים ישנו מייצב כיוון שמטרתו להגדיל את היציבות הרוחבית.
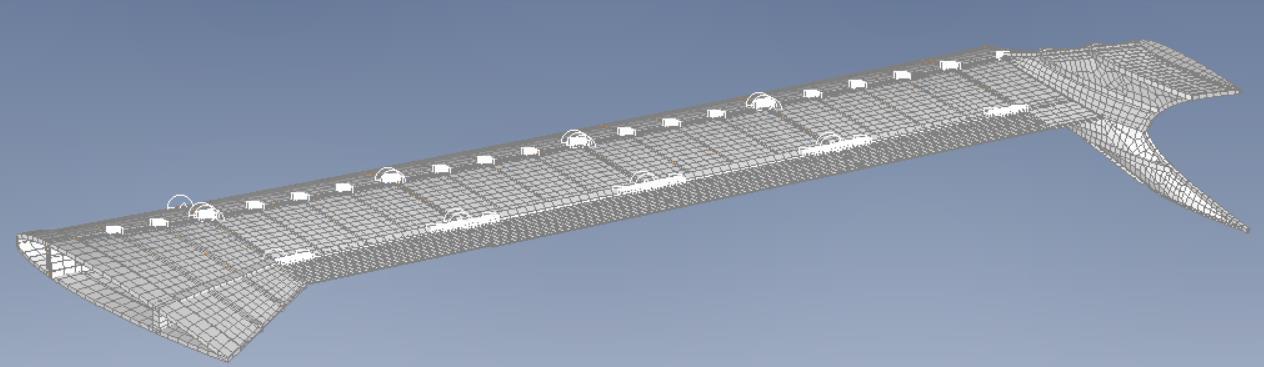
הפיתוח מבוסס על מודלים חישוביים (מבני, אוירודינמי, אוירואלסטי) ברמות סמך גבוהות המאומתות מול ניסויים. אנליזות CFD בסביבת EZNSS, כולל פתרון משוואות נאבייה-סטוקס אלסטיות. אנליזות אוירואלסטיות, חישוב נגזרות אווירודינמיות גמישות ואנליזות פרפור, באלמנטים סופיים בסביבת FEMAP ו- ZAERO. תכנון מערכת הבקרה על בסיס מודל אווירודינמי בלתי-לינארי עם שש דרגות חופש בסביבת MATLAB, תכנון מבנה והכנה להדפסת תלת מימד בסביבת תוכנת התיב"ם SOLIDWORKS. אנליזות חוזק בסביבת תוכנות אלמנטים סופיים, NASTRAN. ABAQUS
המסמך המסכם לשנה ב' מציג את הפיתוח משנה א, ומאפשר רצף הבנתי להצגת המשך הפעילות בשנה ב. המסמך כולל התייחסות לשלושת ניסויי ההטסה, וכולל את עיקרי התחקור, מסקנות והמלצות להמשך הפעילות. המסמך מציג את פיתוח המודלים ותוצאותיהם, חקירה פרמטרית והבנה ויכולת חיזוי להתנהגות המטוס הן על בסיס מודלים והן על הסיס סימולטור בעל ממשק גרפי המאפשר לסמלץ מקרי הטסה וחקירה מעמיקה של התנהגות המטוס.
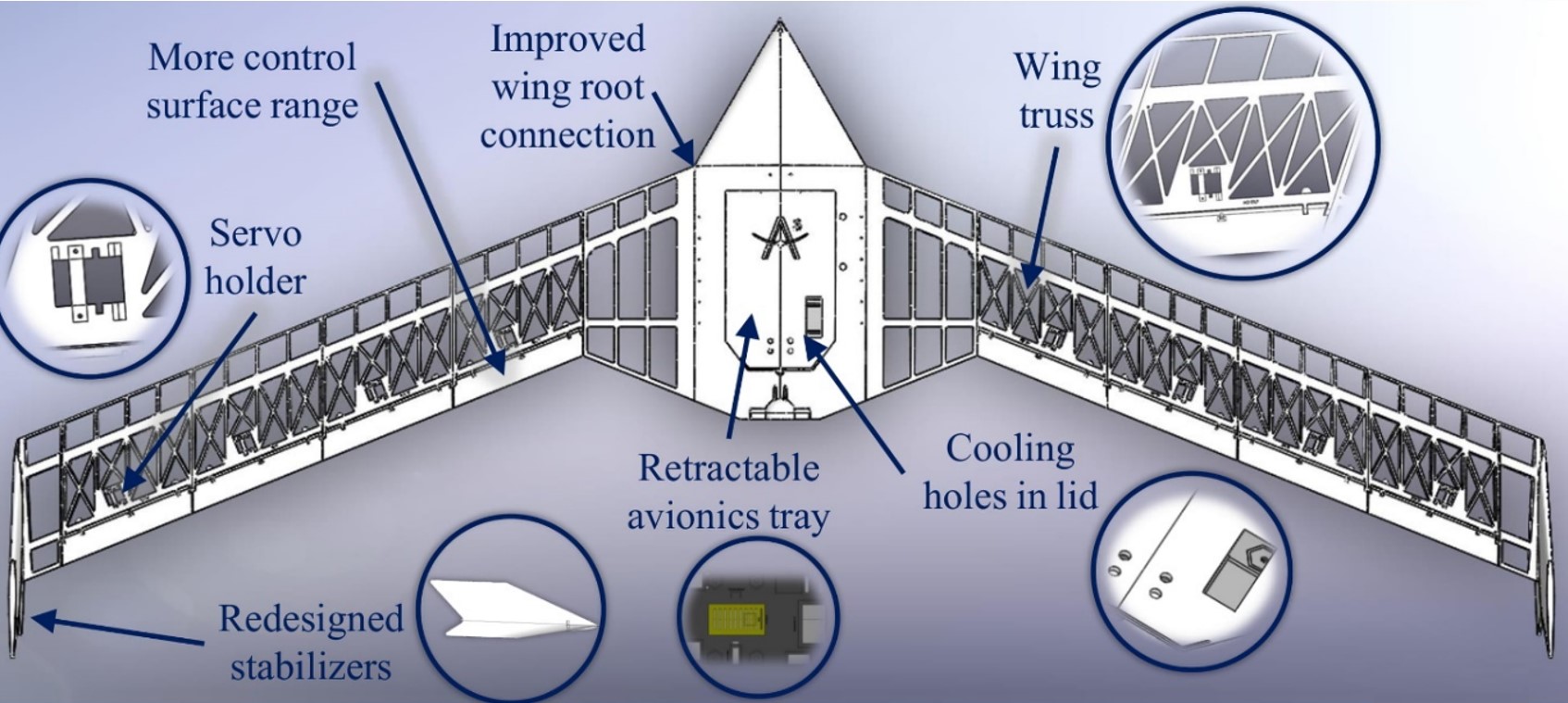
במהלך השנה השניה, פותח דור II מבני של המטוס. עיקר ההבדלים בין הדור II לבין הדור I של המטוס הם:
- תושבות למנועי הסרוו
- תכן מייצבים חדשים
- הגדלת טווח תנועה למשטחי הבקרה
- חיבור שורש כנף משופר
- מגש אוויוניקה נשלף
- פיתחי קירור במכסה
- מסבך במעטה הכנף להקשחת הכנף לפיתול ודחיית מהירות הפרפור.
הפלטפורמה, דור II, (סוף שנה ב')
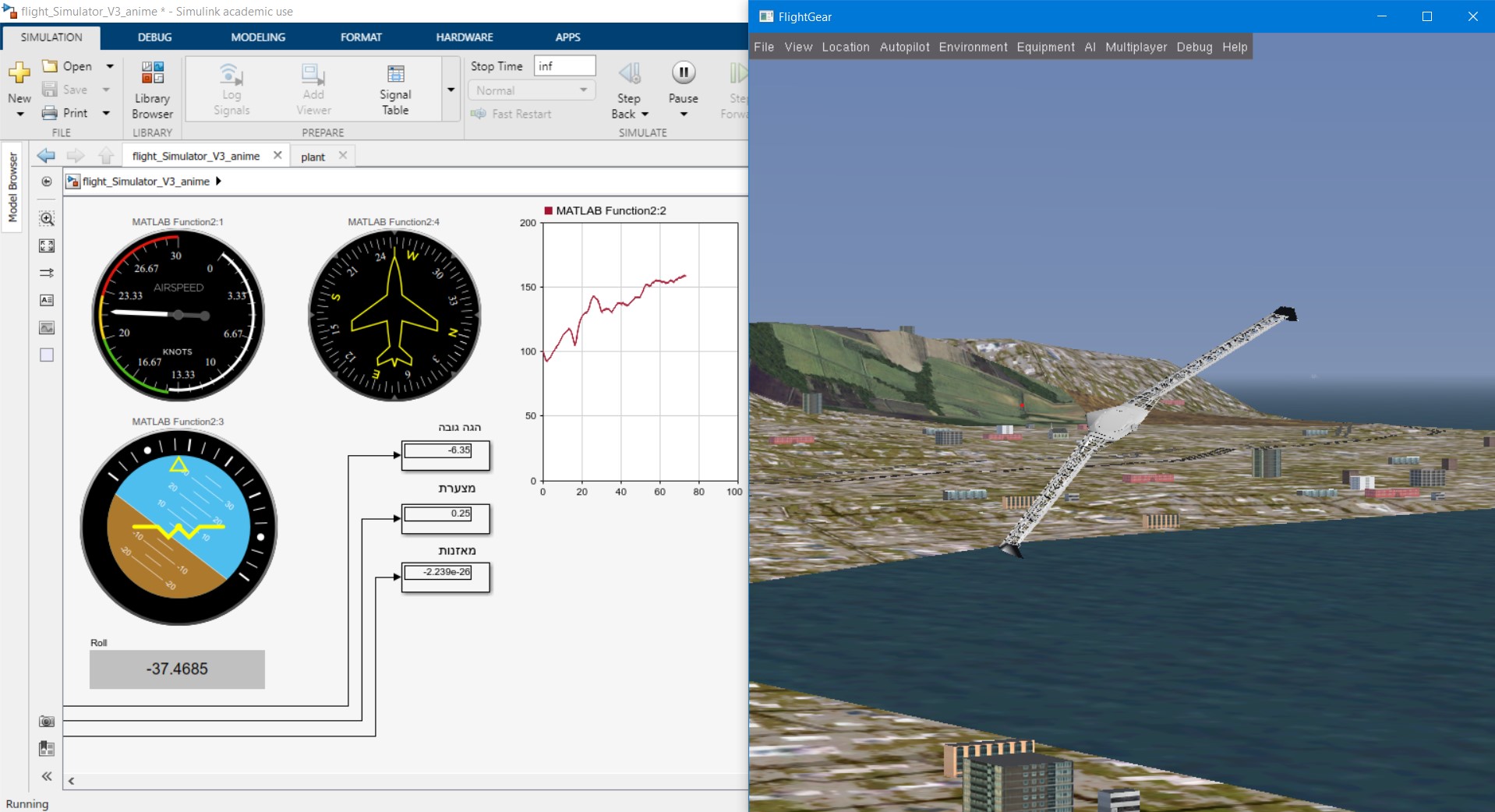
למרות אילוצי התקופה, קורונה, הפרוייקט השיג את כל יעדיו לרבות קיום הטסה. ציטוט של אחד מחברי הצוות מיד לאחר השלמת פעילות ההטסה במאי 2020: "טסנו מופלא. המראנו חלק, ביצענו הטסה והקפות למשך 3 דקות מלאות, הכנסנו והוצאנו את המטוס לפרפור מספר פעמים, יזום ונשלט. המטיס, רועי שכטר, שגם משמש כסטודנט מן המניין בשנה השנייה של הפרוייקט, אהב את תכונות ההטסה של המטוס. אחרי מספר הקפות איבדנו קשר עם המטוס והוא התרסק בשדה ". מצאי ההטסה מאי 2020, בגרף העליון מוצגת מהירות הטיסה כפונקציה של הזמן, ובנוסף, הקו האדום מציג את מהירות הפרפור כפי שנחזתה על בסיס מודל אלמנטים סופיים. בהגרף התחתון מוצג קצב שינוי זווית העלרוד כפונקציה של הזמן. בשני הגרפים הוספנו סמון לרגעים בהם מהירות הטיסה עברה את המהירות הפרפור.

התאמה בין חציית מהירות הפרפור לבין רעידות אלימות בקצב זווית העלרוד
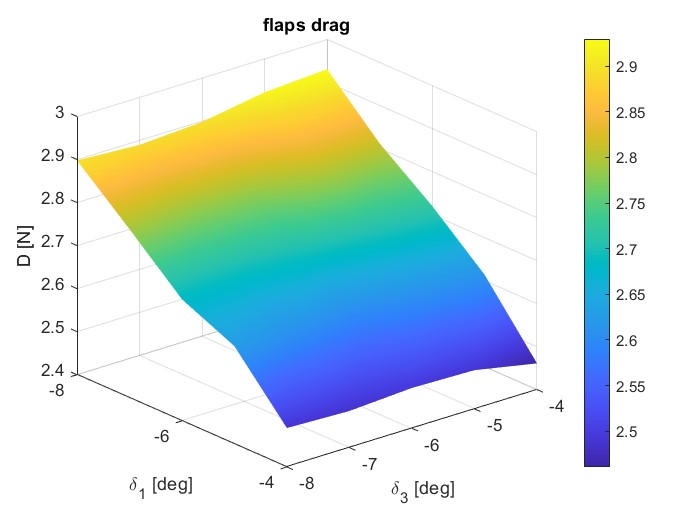
אחת ממטרות הפרויקט היא הוכחת היכולת של פלטפורמה גמישה מעופפת כבעלת יתרונות ביחס לפלטפורמה קשיחה. למטוס 8 משטחי היגוי, 4 משטחים בכל כנף. כל משטח הגה פועל כהגה גובה ומאזנת בו זמנית. הגה הגובה הוא זווית ההגה הממוצעת בין צד ימין לשמאל, המאזנת היא הפרש זווית ההגה בין צד ימין לשמאל. כל הגה יוצר : כוח עילוי, מומנט עלרוד, מומנט גלגול. כלומר כדי לבקר את המטוס דרוש רק הגה אחד בכל כנף. 4 משטחי היגוי בכל כנף מתורגמת ליתירות ומאפשרת ביצוע אופטימיזציה עם מספר רב של אפשרויות. המסמך כולל הצגה לחקירה שבוצעה לשאלת המחקר: "האם ניתן לבצע אופטימיזציית גרר עבור הפלטפורמה הגמישה (בתכן הקיים) המאופיינת במספר רב של משטחי היגוי". החישובים בוצעו בסביבת תוכנה חישובית (EZNSS ) המשלבת CFD ואווירואלסטיות באותה הרצה ולכן נחשבת לבעלות רמת סמך גבוהה מאוד. תהליך האופטימיזציה לרבות המודל המתמטי התוצאות והמסקנות מוצגות במסמך.
אחד מהישגי הפרוייקט במהלך השנה השניה, והוא מעבר ליעדי הפרוייקט המוגדרים, הינו פיתוח סימולטור בעל ממשק גרפי המאפשר ככלי פיתוח וחיזוי להתנהגות המטוס וככלי אימון למטיס כחלופה לניסויי טיסה בשטח.
במהלך השנה השניה פותח מחשב טיסה המבוסס על , Arduino Raspberry Pi 4B . מטרת העל של צוות הבקרה בשנה הנוכחית הייתה לסגור חוגי בקרה לשמירה על גובה, מהירות וזווית גלגול עבור כלי הטיס, עם מודל "מוגמש" הכלל רעשי מדידים, הגבלות ודלאי מפעילים. כדי לענות על הדרישה הזו, תהליך הבקרה התחלק לשני ערוצים מרכזיים: תכן הבקרה ואפיון ושערוך מדידים.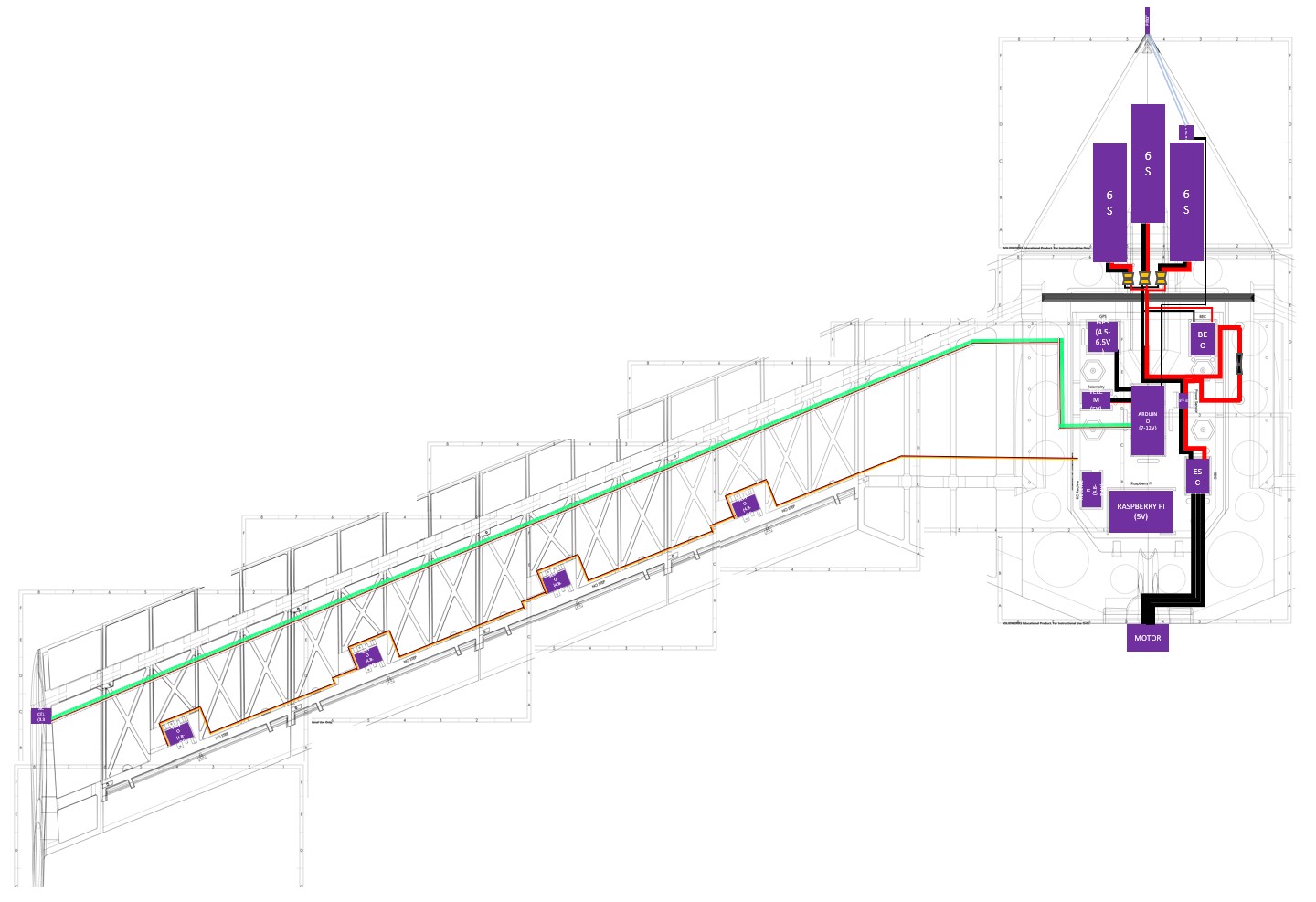
שרטוט חיווט כנף
טבלת משקלים ומומנטים, מרכזת את כל רכיבי המבנה, ההנעה והאוויוניקה. הטבלה התעדכנה באופן שוטף לאורך כל השנה. קיימת חשיבות רבה למעקב אחר שקילה ואיזון. הטבלה מעודכנת לסיום מידול G2 לקראת הדפסתו.
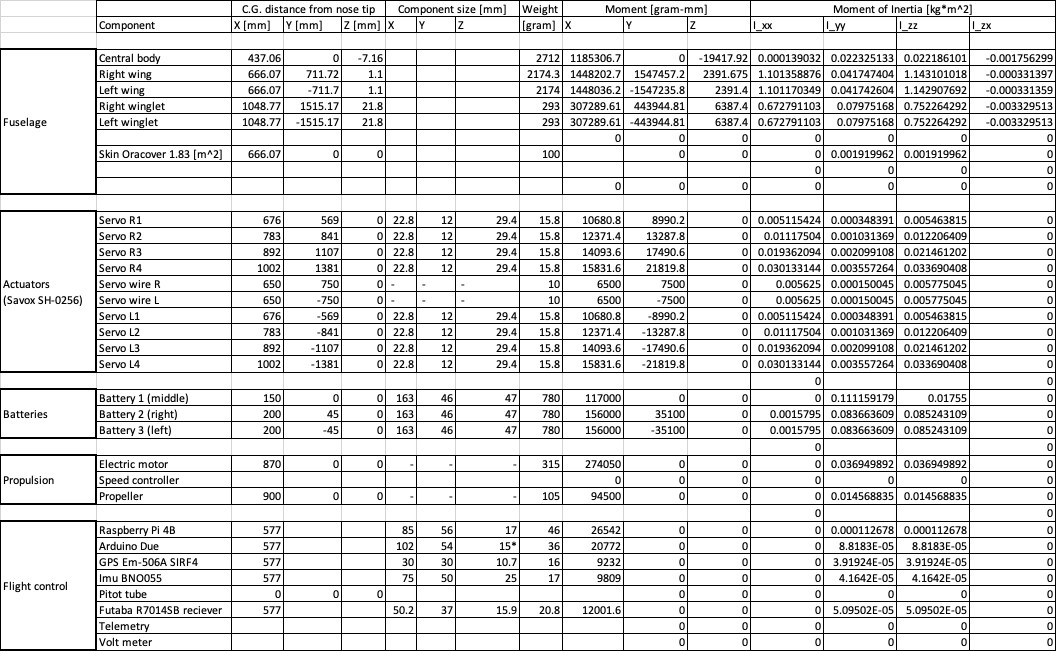
טבלת משקלים ומומנטים
