קבוצת הסטודנטים של הפקולטה להנ' אוירונוטיקה וחלל, בשיתוף עם קבוצת סטודנטים ממדעי המחשב, השתתפה לראשונה בתחרות המטוס האוטונומי הבינלאומית של ארגון AUVSI וזכתה במקום החמישי המכובד, תחת הנחייתו של מר דרור ארצי. בתחרות השתתפו 48 נבחרות, אשר רק 33 מהן הצליחו לעמוד בכל הדרישות המוקדמות והגיעו לקו הטיסה.
לתמונות נוספות, ראו כאן.
למאמר שמסכם את תהליך הפיתוח, ראו כאן.
צוות משותף של סטודנטים מהפקולטה להנ' אווירונאוטיקה וחלל ומהפקולטה למדעי המחשב, בהנחיית המרצה דרור ארצי, פיתח תוך 9 חודשים בלבד מערכת מוטסת המבצעת תצפית (Reconnaissance), זיהוי מטרות, העברת תיקשורת והטלת מטענים למטרה וכל זאת בצורה אוטונומית לחלוטין. המערכת השתתפה בתחרות היוקרתית של ארגון AUVSI שהתקיימה ביוני 2014 בשדה וובסטר, ארה"ב וזכתה במקום ה-5 (מתוך 48).
באוגוסט 2013 החלה העבודה. כאמור, קבוצת משותפת של סטודנטים מהפקולטה להנדסה אווירונאוטית וחלל והמחלקה למדעי המחשב בהנחייתו של דרור ארצי התחילה לעסוק בפיתוח המערכת האווירית. המערכת כללה כלי טייס בלתי מאוייש המונע בשני מנועים חשמליים בעל יכולת טיסה אוטונומית, מצוייד במצלמה מיוצבת לזיהוי מטרות קרקעיות תוך איתור סוגן ומיקומן המדויק. כמו כן כלל המטוס מחשב מוטס שביצע את עיבוד התמונה, מערכת תיקשורת לשליטה, בקרה והעברת תמונות. בנוסף כלל המטוס מטען נישא עם יכולת שיחרור לפגיעה מדוייקת למטרת קרקע. החלק הקרקעי של המערכת כלל תחנת שליטה למעקב אחרי הטיסה האוטונומית ואיסוף תמונות המטרה ועיבודן וכן מערכת תיקשורת לפיקוד, בקרה והעברת תמונות המטרה. כלומר, מערכת כוללת המדמה מערכת מבצעית אמתית.

כדי לעמוד בלו"ז הכל כך קצר ואתגרי שהציבו תנאי התחרות נקט הצוות בגישת פיתוח שהתבססה על פיתוח מהיר ביותר של תצורה אוירודינאמית של כלי הטייס, ביצוע Initial sizing "זריז" ובנייה מהירה של מטוס מדגים בסדנה של הפקולטה לאווירונאוטיקה, מטוס איתו צברו שעות טיסה רבות ובעזרתו פותחו ואומתו כל מרכיבי המערכת (צילום, מיחשוב, תקשורת וכו'). כל זאת במקביל לתכן ההנדסי, לאנאליזות ולפיתוח האלגוריתם לעיבוד התמונות.
כל עבודת הפיתוח (תכן ואנאליזות), שילוב המערכות וביצוען סוכמו והוצגו ע"י הסטודנטים בסקר תיכון מוקדם – PDR שהתקיים כבר בתחילת דצמבר 2013.
לאחר הקפאת התצורה של כלי הטייס ייצרו הסטודנטים שני מטוסים זהים שגופם עשוי מחומרים מרוכבים (גרפיט/אפוקסי) ומשטחי העילוי (כנפיים וזנבות) מעץ תעופתי. במטוסים הותקנו כל המערכות ובוצעה אינטגרציה ובדיקה לשילובן ותיפקודן התקין. בנוסף בוצעו ניסויי קרקע (ובכלל זה ניסוי העמסה סטאטית לכנפיים) לשני המטוסים.
לקראת השלמת המערכת בוצע מבחן כולל לתפעולה ותפקודה כדי לאשר את מוכנותה לביצוע כל המשימות במתכונת התחרות – מבחן "Go No Go". המטוס טס, צוות התפעול עבד בצורה מתואמת, כל המשימות בוצעו ויום הטיסות סוכם ב- "Go " – יש אישור ליציאה לתחרות.
כמו בפיתוח מערכת ב"חיים האמיתיים", חווה גם צוות הסטודנטים אכזבות במהלך הפיתוח, התרסקות מטוס לא מוסברת שנחקרה ונותחה לעומק ע"י הסטודנטים עד למציאת הסיבות לתקלה ותיקון ושיפור המערכת. ההתרסקות סיכנה את המשך הפיתוח ואת היכולת להשלים את המערכת ולהביאה למצב בוגר ואמין למועד התחרות, והעמידה במבחן את הנחישות של צוות הסטודנטים להמשיך ולעמוד ביעדים למרות התיסכול והאכזבה – חוויה מחשלת חיונית בהכשרה של כל מהנדס וחוקר לעתיד.
המערכת כולה נארזה ע"י הסטודנטים ונשלחה לארה"ב שם הצוות הרכיב אותה ומיד ביצע ניסויי טיסה ואינטגרציה יום לפני תחילת התחרות. בשדה וובסטר – השדה בו התקיימה התחרות, התקבצו מיטב האוניברסיטאות מארה"ב ומשאר העולם, אוניברסיטאות שמשתתפות בתחרות ברציפות שנים רבות, כל אוניברסיטה עם המערכת שלה, כלי טייס בתצורות שונות – מפגש נלהב של סטודנטים סקרנים. וצוות הטכניון – הגיע לשם לראשונה.
כל מערכת עברה לפני אישורה לטיסה בדיקות בטיחות מקיפות ובכלל זה בדיקת מבנה ואינטגרציית מערכות, בדיקת קשר ואי הפרעה ובדיקות EMI – צוות הטכניון הגיע עם שני כלי טייס ועבר עם שניהם את הבדיקות "במכה ראשונה", מייד לאחר מכן הציגו הסטודנטים לחבר השופטים את מוכנות המערכת לטיסה FRR – Flight Readiness Review כשהם סוקרים את כל תהליך הפיתוח והניסויים של המערכת ואת כל מנגנוני היתירות שנותנים ביסוס לאמינות ובטיחות המערכת.
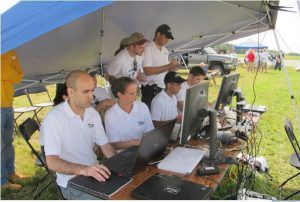
התחרות התבצעה במתכונת של "פריסה מבצעית", תוך הרבה פחות מ-20 הדקות (המוקצות לפריסה ע"י חוקת התחרות), הייתה כל המערכת כולל התחנה הקרקעית מוכנה לפעולה, ואחרי תדרוך שנתן אחד הסטודנטים לצוות (מול העיניים הבוחנות של השופטים) המריא המטוס לבצע את המשימות.
המטוס התחיל בטיסה אוטונומית לאורך נקודות ציון (Way Points), בהמשך נכנס לאזור חיפוש לצורך זיהוי מטרות ואפיונן (סוג, צבע, אוריינטציה, דיקור מיקום), בהמשך ביצוע תצפית למטרה מחוץ לאזור החיפוש, זיהוי מטרת דמות, קבלת תשדורות מממסר קרקעי והעברתן לתחנת הפיקוד הקרקעית ולסיכום הטלת מטען מגובה 350 רגל למטרה – גם ההטלה בוצעה בצורה אוטונומית כשהמטוס מבצע יעף מעל המטרה, מודד נתונים (עוצמת רוח וכיוון) וביעף הבא כשהתקיימו תנאי השיגור המערכת שיחררה את המטען אוטומטית במרחק מזערי של 46 רגל מהמטרה.
אחרי 30 דקות של טיסה אוטונומית רציפה נחת המטוס בבטחה.
התחרות הסתיימה בערב מרשים בו התכנסו כל הנבחרות למעמד הכרזת התוצאות, היתה התרגשות עצומה לשמוע את הכרזת השופטים על מקומנו הכה גבוה (ובמיוחד להשתתפות ראשונה) וליווינו במחיאות כפיים את ראש הפרויקט – הסטודנט נאור מואדב כשעלה לבמה לקבל את הפרס.
לסיכום – במהלך תשעת החודשים התנסו הסטודנטים בפיתוח מערכת כוללת, בייצור כלי טייס, בביצוע אנליזות וניסויים מורכבים, בתפעול המערכת כולה תוך עבודת צוות מתואמת (CRM) , בביצוע "פריסה מבצעית" (בארה"ב) והביאו את המערכת לשיא תפקודה בתחרות וכל זה כאמור בתשעה חודשים !!!
קיבלנו סיוע ותמיכה מכמה חברות וארגונים ובכלל זה הנהלת הטכניון, חברת רפאל, התעשייה האווירית, המגזין ,Israel Defense התכנית הטכניונית למערכות אוטונומיות ((Technion Autonomous Systems Program, המעבדה לעיבודים גיאומטריים של תמונה (GIP – Geometric Imaging Processing Lab) של המחלקה למדעי המחשב בטכניון. חברת אלביט, וחברת VectorNav. – ועל כך תודתנו המלאה.
צוות הטכניון הפתיע את שאר המתחרים והשופטים במקום הגבוה שהשיג כבר בהשתתפותו הראשונה בתחרות. הצוות הדגים בכך את הרמה האקדמית הגבוהה של בוגרי הטכניון לעתיד, והציג שוב את יכולותיה של ישראל בפיתוח מערכות משולבות וכלי טייס בלתי מאוישים.

לתמונות נוספות, ראו כאן.
לפרסומים על ה-AUVSI ועל הזכיה בתחרות, ראו כאן, כאן וכאן.
אנו מודים לתורמים שלנו:


![]()