DROGO
- Adi Zamusitanu, Hofit Dayan, Ori Haber, Aviad Yaari, Andrey dornin, Alon Preger, Michal Tsirulnikov
- Ami Zango

Project Objective: Design, development, and manufacture of a vehicle composed of several autonomous elements which can continue the mission separately. The vehicles mission relevant characteristics to be greater from the sum of its autonomous parts.
System requirements
- A single drone will carry a package weighing up to and up to
- Individual element wight
- Take off and fly up to above ground
- Flight range up to 30 [??]
- Delivering the package
- Horizontal flight back to the shipping point
Work teams:
- Aerodynamics
- Structure
- Control and simulation
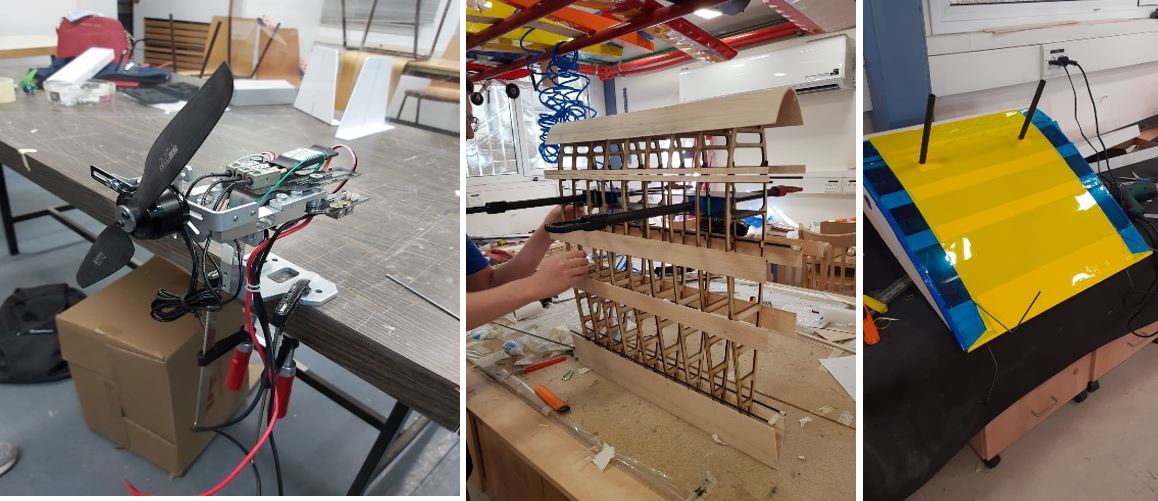
The group that developed this project is made of seven students. As part of the project, meetings were held with the project Supervisor once a week, each team presented theirs progress during the week and theirs goals for the following week. During the year, an engine running experiment and prototype production took place in the UAV laboratory
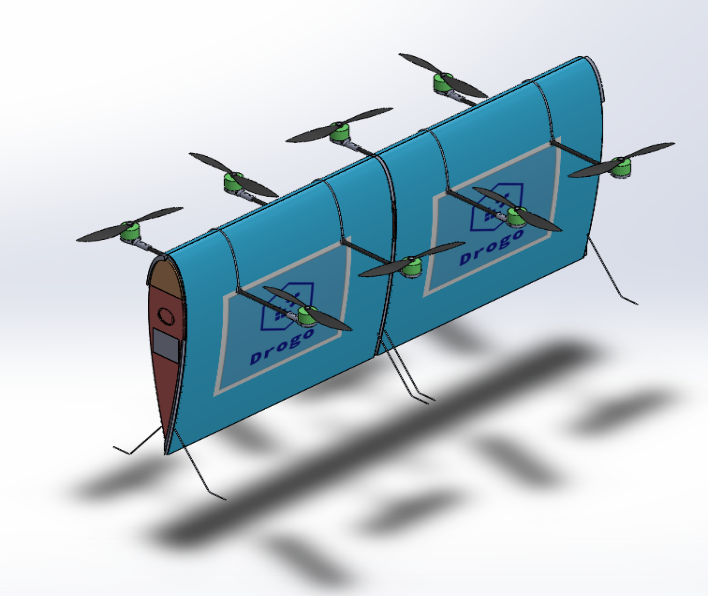
In the first semester we did market survey, searching for similar vehicles. The chosen solution is a vehicle which is compounded from multiple tail-sitter drones – which creates a combination of quadcopter and rigid long wing. This vehicle has vertical takeoff and landing abilities and due to the wing can cruise as airplane and after that split to individual elements as each element is send to its unique mission. The chosen solution was chosen by consideration of productivity aerodynamics and controllability.
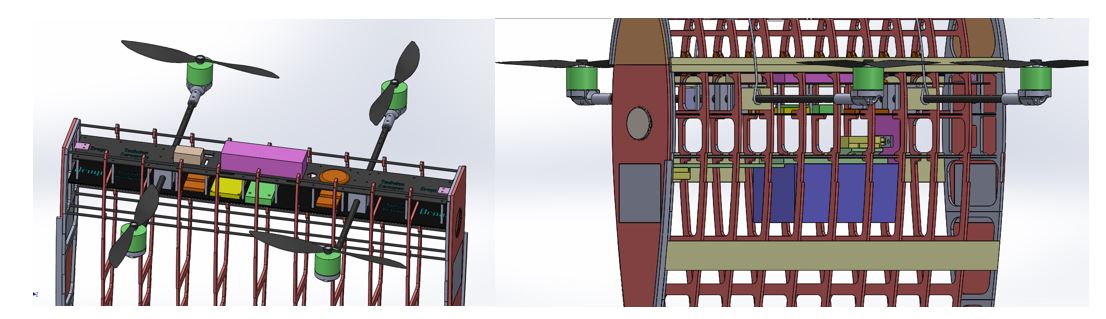
Preliminary-design and critical-design of the element has done. We defined the electronics devices that used, motors, ESC, the dimensions of the frame, blades, arms, stages etc. Main dimensions: NACA0018 airfoil, cord length and wing width 65 cm, diameter of blades – 11 inch. Material: carbon, poplar tree.
Moreover, we developed a unique connection mechanism that allows to the elements to connect and disconnect to the mother configuration and give to vehicle a long wing shape and large wing area.
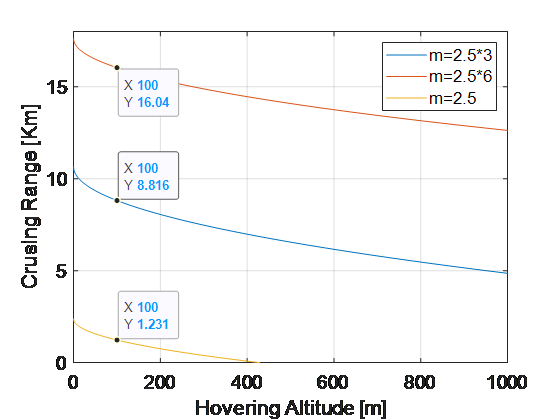
Aerodynamic analysis proofed that this configuration has better energetic efficiency and aerodynamic efficiency compare to standard quadcopter or one tail-sitter. The vehicle can reach larger ranges and keep its battery life.
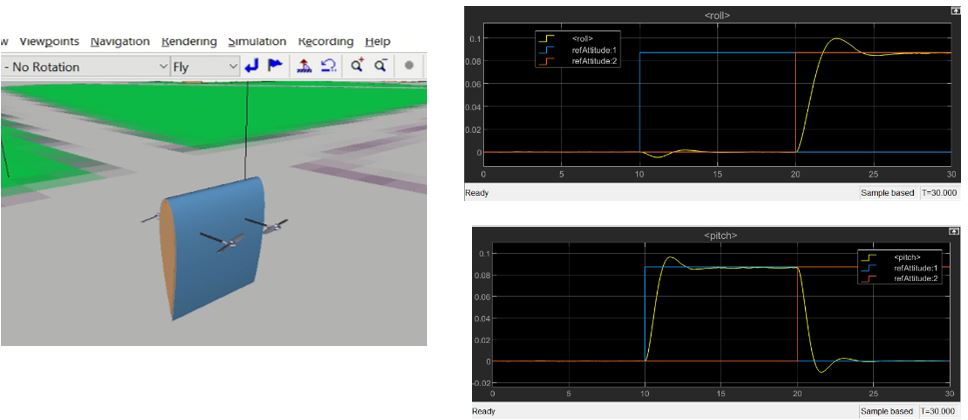
We developed 6DOF simulation which includes pose visualization, aerodynamic model, motor model, and controls loops (height perseverance, pitch, roll, yaw loops)
Motor running test was performed to perfect the motor model in the simulation. We build prototype of one element in the faculty workshop and used 3D print to produce some parts.