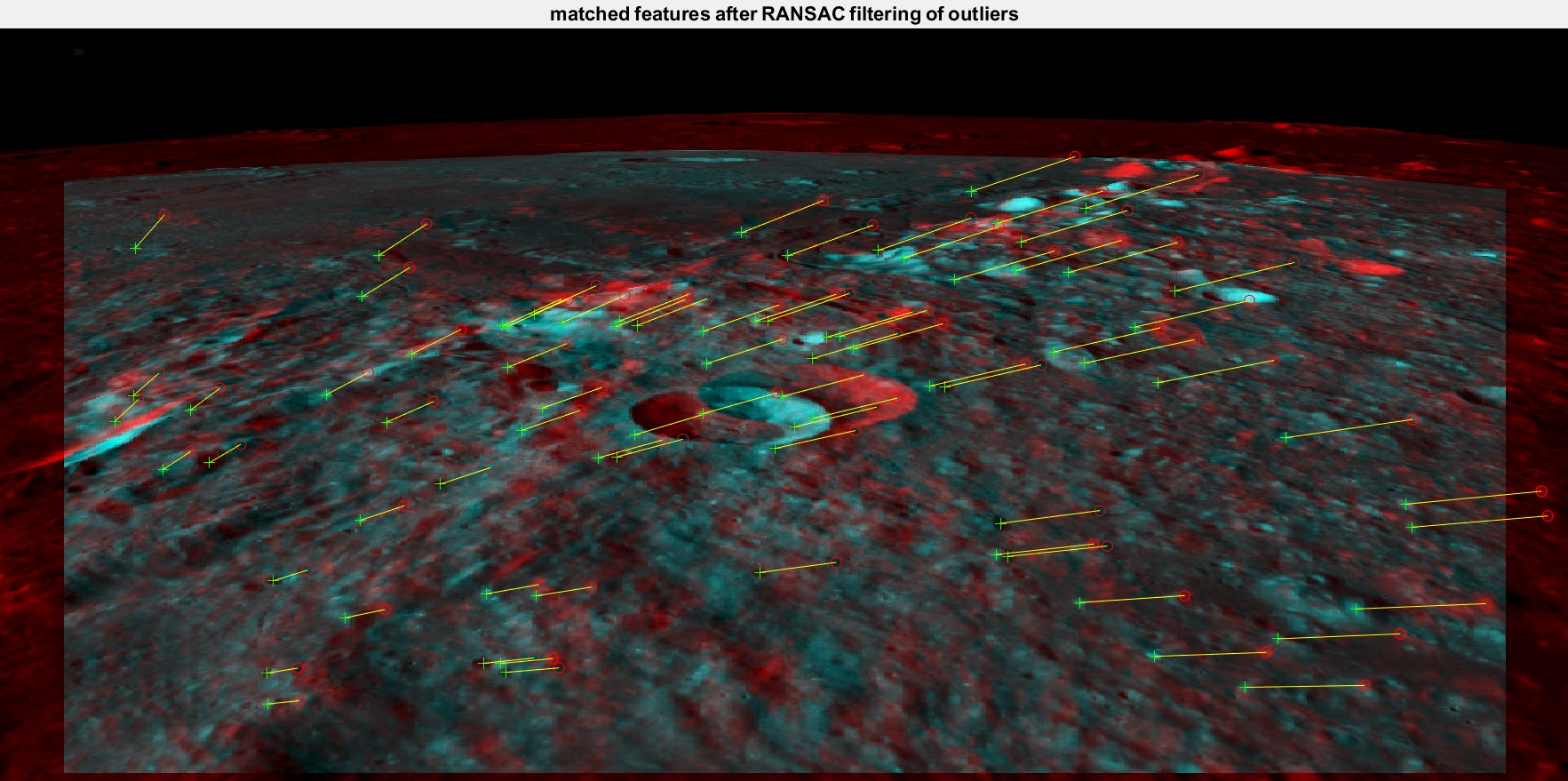
The purpose of the project is to design autonomous lunar landing algorithms using vision sensors. The project entails evaluating structure-from-motion methods based on multi-view geometry, motion estimation, and bundle adjustment. Algorithms such as SLAM and visual odometry will be considered as an option for different settings of sensors. The investigation will include far-field and near-field motion estimation based on lunar crater and/or feature matching.